imu_tk note [TOC] Overview 本文以标定 Realsense D435i 为例。 加速度计的标定利用了加速度计在静止状态下的三轴数据模值等于重力加速度这一条件,采集加速度计在不同状态的静止数据,通过优化算法即可求出标定参数。加速度计单独即可完成标定,陀螺仪的标定需要加速度计数据的参与,所以需要先标定好加速度计。在标定陀螺仪时,IMU从静止状态A,通过一段时间,到了静止状态B,通过陀螺仪可以算出来A 2021-11-16 INS #Sensor Calibration #INS #IMU #IMU Calibration
Microsoft HoloLens Note [TOC] Overview https://en.wikipedia.org/wiki/HoloLens_2 https://docs.microsoft.com/zh-cn/hololens/ Hololens 2 Display Evaluation (Part 1: LBS Visual Sausage Being Made) Hololens 硬件 https://www.micr 2021-11-02 XR #Stereo Vision #Camera #Visual SLAM #HoloLens
OpenVINS Note [TOC] Overview docs: https://docs.openvins.com/ code: https://github.com/rpng/open_vins paper 12345678@Conference{Geneva2020ICRA,Title = {OpenVINS: A Research Platform for Visual-Inertial Estima 2021-05-27 SLAM #Visual SLAM #VIO #MSCKF
Fiducial Markers & Marker Board [TOC] Overview Raspberry Pi position detection using fiducial tags AprilTag AprilTag is a visual fiducial system, useful for a wide variety of tasks including augmented reality, robotics, and camera 2021-05-24 Computer Vision #Computer Vision #Camera Calibration #Fiducial Markers
3D欧式变换之AB两坐标系间变换 [TOC] Frame A to B Frame B 的基向量 到 Frame A 的基向量 \[ B = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \Longrightarrow A = \begin{bmatrix} 0 & 2021-03-31 Kinematics #Kinematics #Euclidean Transform
IMU数据滤波 [TOC] 一阶低通滤波 一阶低通滤波,又叫 一阶惯性滤波,其算法公式为: \[ Y_k = \alpha X_k + (1-\alpha) Y_{k-1} \] 根据安卓开发者文档中提供的低通滤波算法: 123456789101112131415161718// https://developer.android.com/guide/topics/sensors/sensors_motion#j 2021-03-28 INS #INS #IMU
Ubuntu 16.04 下 PVIO 的编译与运行 [TOC] Overview code: https://github.com/zju3dv/PVIO paper 1234567891011@inproceedings{PRCV-LiYHZB2019, author={Jinyu Li and Bangbang Yang and Kai Huang and Guofeng Zhang and Hujun Bao}, title = 2021-03-28 SLAM #Visual SLAM #VIO #Struct SLAM
Ego-motion vs Odometry vs Pose Estimation [TOC] Ego-motion Ego-motion is defined as the 3D motion of a system (ex camera) within an environment. Visual Odometry Odometry is generally used to refer to an elapsed or relative position and ori 2021-02-06 SLAM #Visual SLAM #Pose Estimation
EKF v.s. ESKF or Direct v.s. Indirect KF [TOC] Overview EKF and ESKF: EKF: Extended Kalman Filter --> Direct Kalman Filter ESKF: Error State Kalman Filter --> Indirect Kalman Filter Estimator State Types: True State Nominal State Er 2020-12-30 State Estimation #Kalman Filter #EKF #ESKF #State Estimation
VirtualBox on Ubuntu Install VirtualBox download: https://www.virtualbox.org/wiki/Downloads install 1sudo dpkg -i virtualbox-6.1_6.1.36-152435_Ubuntu_bionic_amd64.deb Install VirtualBox Extension Pack download: https:/ 2020-12-18 DevOps #Virtual Machine
Data Association in MSCKF [TOC] MSCKF 123456789101112typedefstd::map<FeatureIDType, Feature, std::less<int>, Eigen::aligned_allocator<std::pair<const FeatureIDType, Feature> > > MapServer;struct Featur 2020-10-10 SLAM #DSA #Graph #Visual SLAM #VIO #MSCKF #Data Association
VINS-Mono LoopClosure [TOC] Overview 忽略掉了 shift to base frame:w_t_vio, w_r_vio loop closure 初始化 PoseGraph 设置 设置参数 启动线程 PoseGraph::optimize4DoF 或 PoseGraph::optimize6DoF 加载 词典文件 启动线程 SystemROS::loop_closing 线程 l 2020-09-29 SLAM #Visual SLAM #Pattern Recognition #BoW #Loop Closure #VIO
the Inflated IMU Noise Params in SLAM ref: https://vision.in.tum.de/data/datasets/visual-inertial-dataset 2020-09-17 INS #INS #IMU #VIO
Ubuntu 16.04 下 Android Native Libs 交叉编译 [TOC] CImg for Android Add the following code in CImg.h from https://github.com/dtschump/CImg.git to NOT use Xlib.h: 12#undef cimg_display#define cimg_display 0 build OpenCV for Android https://blog. 2020-08-12 DevOps #Android #ARM #Android NDK #Cpp #Cross Compilation
图像分析之ORB特征 [TOC] Overview Oriented FAST + Rotated BRIEF Feature/Corner Detector FAST方法 -- 定位特征点坐标 矩方法 -- 特征点方向 非极大值抑制 -- 特征点响应值(分数) 图像金字塔 -- 特征点具有 尺度不变性 Descriptor BRIEF -- 特征点描述子 特征点方向 -- 描述子具有 旋转不变 2020-07-13 Computer Vision #Computer Vision #DIP #Image Features
图像分析之高斯滤波 [TOC] 高斯函数 一维高斯函数 \[ f(x) = A \cdot e^{-\frac{(x-\mu)^2}{2{\sigma}^2}} \] 多维高斯函数 \[ f_{X}\left(x_{1}, x_{2}, \cdots, x_{k}\right) = A \cdot \exp \left(-\frac{1}{2}(X-\mu)^{T} \Sigma^{-1}(X-\mu)\right) 2020-07-12 Computer Vision #Computer Vision #DIP #Gaussian Filter
IMU Errors Analysis [TOC] Overview 确定性误差(六面法 标定) 开机后恒定的零偏误差(bias) 比例因子误差(scale factor) 轴偏及非正交误差(misalignment errors and non-orthogonality) 非线性误差(non-linearity) 温度误差(thermal noise) 陀螺仪还包含加速度的变化引起的误差(g-dependent noise) 2020-05-24 INS #INS #IMU
IMU Overview [TOC] Overview 陀螺仪知道“我们转了个身”,加速计知道“我们又向前走了几米”,而磁力计则知道“我们是向西方向”的。 9轴传感器:3轴加速度计、3轴陀螺仪、3轴磁力计 飞行控制器——惯性测量模块IMU introlab/OpenIMU: Open Source Analytics & Visualisation Software for Inertial Measuremen 2020-05-24 INS #INS #IMU
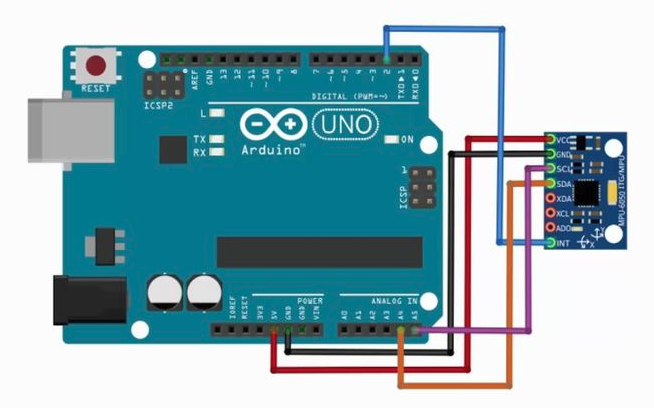
通过 Arduino 从 MPU6050 获取 IMU 数据进行姿态解算,并利用 Processing 进行三维姿态显示 Overview A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications Arduino UNO & MPU6050 GY521 Arduino教程:MPU6050的数据获取、分析与处理 How to Interface Arduino and the MPU 60 2020-05-24 INS #ARM #Embedded #INS #IMU #Arduino #Processing