Last updated on March 2, 2026 pm
[TOC]
Overview
本文以标定 Realsense D435i 为例。
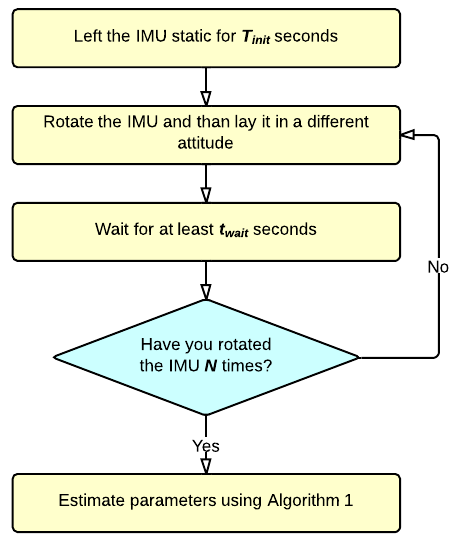
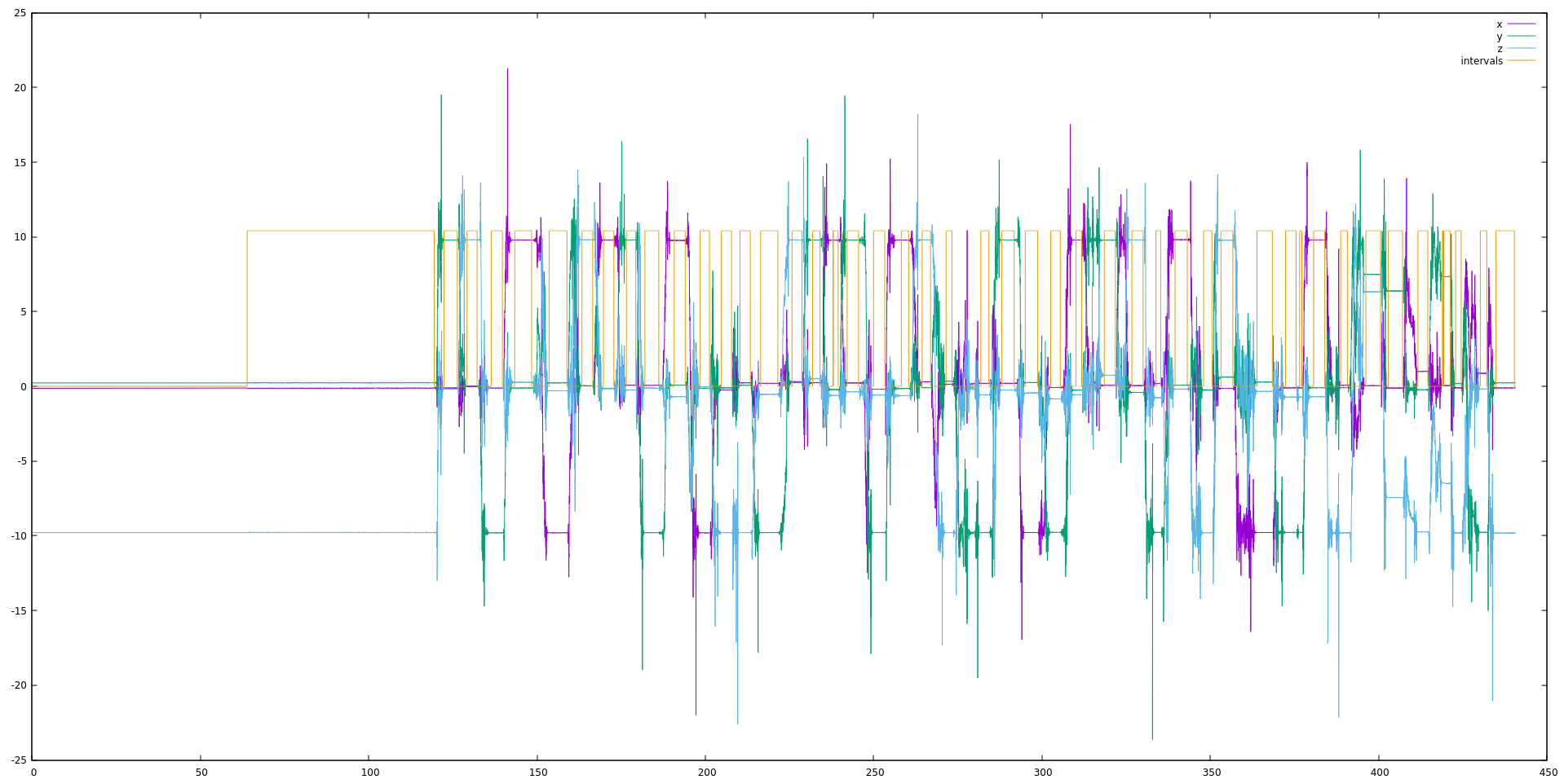
加速度计的标定利用了加速度计在静止状态下的三轴数据模值等于重力加速度这一条件,采集加速度计在不同状态的静止数据,通过优化算法即可求出标定参数。加速度计单独即可完成标定,陀螺仪的标定需要加速度计数据的参与,所以需要先标定好加速度计。在标定陀螺仪时,IMU从静止状态A,通过一段时间,到了静止状态B,通过陀螺仪可以算出来A到B的旋转矩阵,而通过加速度数据也可以算出来A到B的旋转矩阵,最小化这一差异即可实现优化求解。
Code
- https://github.com/cggos/imu_tk
- imu_tk ROS
Collect IMU data
Build
需要修改代码里的offset和scale,把offset设置为0,把scale设置为1
1
2
3
4
5
|
init_acc_calib.setBias( Vector3d(0, 0, 0) );
init_gyro_calib.setScale( Vector3d(1.0, 1.0, 1.0) );
mp_calib.setGravityMagnitude(9.8016);
|
Run
1
2
| cd bin/
./test_imu_calib acc.mat gyro.mat
|
Output
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
| Importing IMU data from the Matlab matrix file : /home/cg/Downloads/acc_d435i.mat
Importing IMU data from the Matlab matrix file : /home/cg/Downloads/gyr_d435i.mat
Accelerometers calibration: calibrating...
Accelerometers calibration: extracted 46 intervals using threshold multiplier 2 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.303187e+01 0.00e+00 1.16e+03 0.00e+00 0.00e+00 1.00e+04 0 7.22e-03 7.64e-03
1 2.903204e-01 7.27e+01 5.90e+01 2.87e-01 1.00e+00 3.00e+04 1 8.33e-03 1.60e-02
2 2.617510e-01 2.86e-02 1.15e-02 3.27e-03 1.00e+00 9.00e+04 1 7.94e-03 2.40e-02
residual 0.261751
Accelerometers calibration: extracted 46 intervals using threshold multiplier 3 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.320660e+01 0.00e+00 1.17e+03 0.00e+00 0.00e+00 1.00e+04 0 7.39e-03 7.68e-03
1 2.920290e-01 7.29e+01 5.97e+01 2.87e-01 1.00e+00 3.00e+04 1 8.28e-03 1.60e-02
2 2.637732e-01 2.83e-02 1.15e-02 3.30e-03 1.00e+00 9.00e+04 1 7.47e-03 2.35e-02
residual 0.263773
Accelerometers calibration: extracted 46 intervals using threshold multiplier 4 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.320781e+01 0.00e+00 1.17e+03 0.00e+00 0.00e+00 1.00e+04 0 6.83e-03 7.05e-03
1 2.906375e-01 7.29e+01 5.99e+01 2.87e-01 1.00e+00 3.00e+04 1 7.65e-03 1.47e-02
2 2.624371e-01 2.82e-02 1.14e-02 3.27e-03 1.00e+00 9.00e+04 1 7.99e-03 2.27e-02
residual 0.262437
Accelerometers calibration: extracted 46 intervals using threshold multiplier 5 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.316700e+01 0.00e+00 1.17e+03 0.00e+00 0.00e+00 1.00e+04 0 7.16e-03 7.64e-03
1 2.997427e-01 7.29e+01 6.00e+01 2.87e-01 1.00e+00 3.00e+04 1 7.92e-03 1.56e-02
2 2.717076e-01 2.80e-02 1.17e-02 3.22e-03 1.00e+00 9.00e+04 1 7.55e-03 2.31e-02
residual 0.271708
Accelerometers calibration: extracted 46 intervals using threshold multiplier 6 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.318641e+01 0.00e+00 1.17e+03 0.00e+00 0.00e+00 1.00e+04 0 6.83e-03 7.18e-03
1 2.925727e-01 7.29e+01 6.03e+01 2.88e-01 1.00e+00 3.00e+04 1 7.51e-03 1.47e-02
2 2.646989e-01 2.79e-02 1.15e-02 3.19e-03 1.00e+00 9.00e+04 1 8.01e-03 2.27e-02
residual 0.264699
Accelerometers calibration: extracted 46 intervals using threshold multiplier 7 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.322846e+01 0.00e+00 1.16e+03 0.00e+00 0.00e+00 1.00e+04 0 7.31e-03 7.56e-03
1 2.962436e-01 7.29e+01 6.06e+01 2.88e-01 1.00e+00 3.00e+04 1 7.85e-03 1.55e-02
2 2.684434e-01 2.78e-02 1.12e-02 3.14e-03 1.00e+00 9.00e+04 1 7.80e-03 2.33e-02
residual 0.268443
Accelerometers calibration: extracted 46 intervals using threshold multiplier 8 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.324374e+01 0.00e+00 1.16e+03 0.00e+00 0.00e+00 1.00e+04 0 7.08e-03 7.37e-03
1 2.997994e-01 7.29e+01 6.07e+01 2.88e-01 1.00e+00 3.00e+04 1 7.45e-03 1.48e-02
2 2.720214e-01 2.78e-02 1.10e-02 3.10e-03 1.00e+00 9.00e+04 1 7.58e-03 2.24e-02
residual 0.272021
Accelerometers calibration: extracted 46 intervals using threshold multiplier 9 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.325722e+01 0.00e+00 1.16e+03 0.00e+00 0.00e+00 1.00e+04 0 6.96e-03 7.21e-03
1 3.011574e-01 7.30e+01 6.06e+01 2.88e-01 1.00e+00 3.00e+04 1 7.99e-03 1.52e-02
2 2.733308e-01 2.78e-02 1.11e-02 3.11e-03 1.00e+00 9.00e+04 1 7.87e-03 2.31e-02
residual 0.273331
Accelerometers calibration: extracted 46 intervals using threshold multiplier 10 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.330019e+01 0.00e+00 1.16e+03 0.00e+00 0.00e+00 1.00e+04 0 7.13e-03 7.45e-03
1 3.019769e-01 7.30e+01 6.05e+01 2.88e-01 1.00e+00 3.00e+04 1 7.92e-03 1.54e-02
2 2.740658e-01 2.79e-02 1.11e-02 3.12e-03 1.00e+00 9.00e+04 1 7.40e-03 2.28e-02
residual 0.274066
Accelerometers calibration: Better calibration obtained using threshold multiplier 2 with residual 0.261751
Misalignment Matrix
1 -0.0010374 0.00307749
0 1 -0.0119756
-0 0 1
Scale Matrix
0.999201 0 0
0 1.00004 0
0 0 1.00224
Bias Vector
-0.0746601
1.5056e-05
0.276673
Accelerometers calibration: inverse scale factors:
1.0008
0.999961
0.997769
Press Enter to continue
Gyroscopes calibration: calibrating...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 5.638980e-03 0.00e+00 3.06e-01 0.00e+00 0.00e+00 1.00e+04 0 1.21e-01 1.21e-01
1 1.007029e-03 4.63e-03 3.78e-03 1.86e-02 9.99e-01 3.00e+04 1 1.23e-01 2.44e-01
2 1.006868e-03 1.61e-07 2.28e-06 7.60e-05 1.00e+00 9.00e+04 1 1.25e-01 3.69e-01
Solver Summary (v 2.0.0-eigen-(3.3.4)-lapack-suitesparse-(5.1.2)-cxsparse-(3.1.9)-eigensparse-no_openmp)
Original Reduced
Parameter blocks 1 1
Parameters 9 9
Residual blocks 45 45
Residuals 135 135
Minimizer TRUST_REGION
Dense linear algebra library EIGEN
Trust region strategy LEVENBERG_MARQUARDT
Given Used
Linear solver DENSE_QR DENSE_QR
Threads 1 1
Linear solver ordering AUTOMATIC 1
Cost:
Initial 5.638980e-03
Final 1.006868e-03
Change 4.632113e-03
Minimizer iterations 3
Successful steps 3
Unsuccessful steps 0
Time (in seconds):
Preprocessor 0.000056
Residual only evaluation 0.008886 (3)
Jacobian & residual evaluation 0.363018 (3)
Linear solver 0.000043 (3)
Minimizer 0.372046
Postprocessor 0.000003
Total 0.372105
Termination: CONVERGENCE (Function tolerance reached. |cost_change|/cost: 1.906368e-10 <= 1.000000e-06)
Gyroscopes calibration: residual 0.00100687
Misalignment Matrix
1 -0.00349484 0.0091083
0.00376498 1 0.00256356
-0.0125506 -0.00301254 1
Scale Matrix
0.997587 0 0
0 0.994327 0
0 0 0.994757
Bias Vector
-0.00401266
-0.001156
0.00173263
Gyroscopes calibration: inverse scale factors:
1.00242
1.00571
1.00527
|
test_imu_acc.calib
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| Accelerometers calibration: Better calibration obtained using threshold multiplier 2 with residual 0.261751
Misalignment Matrix
1 -0.0010374 0.00307749
0 1 -0.0119756
-0 0 1
Scale Matrix
0.999201 0 0
0 1.00004 0
0 0 1.00224
Bias Vector
-0.0746601
1.5056e-05
0.276673
Accelerometers calibration: inverse scale factors:
1.0008
0.999961
0.997769
|
test_imu_gyro.calib
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| Gyroscopes calibration: residual 0.00100687
Misalignment Matrix
1 -0.00349484 0.0091083
0.00376498 1 0.00256356
-0.0125506 -0.00301254 1
Scale Matrix
0.997587 0 0
0 0.994327 0
0 0 0.994757
Bias Vector
-0.00401266
-0.001156
0.00173263
Gyroscopes calibration: inverse scale factors:
1.00242
1.00571
1.00527
|
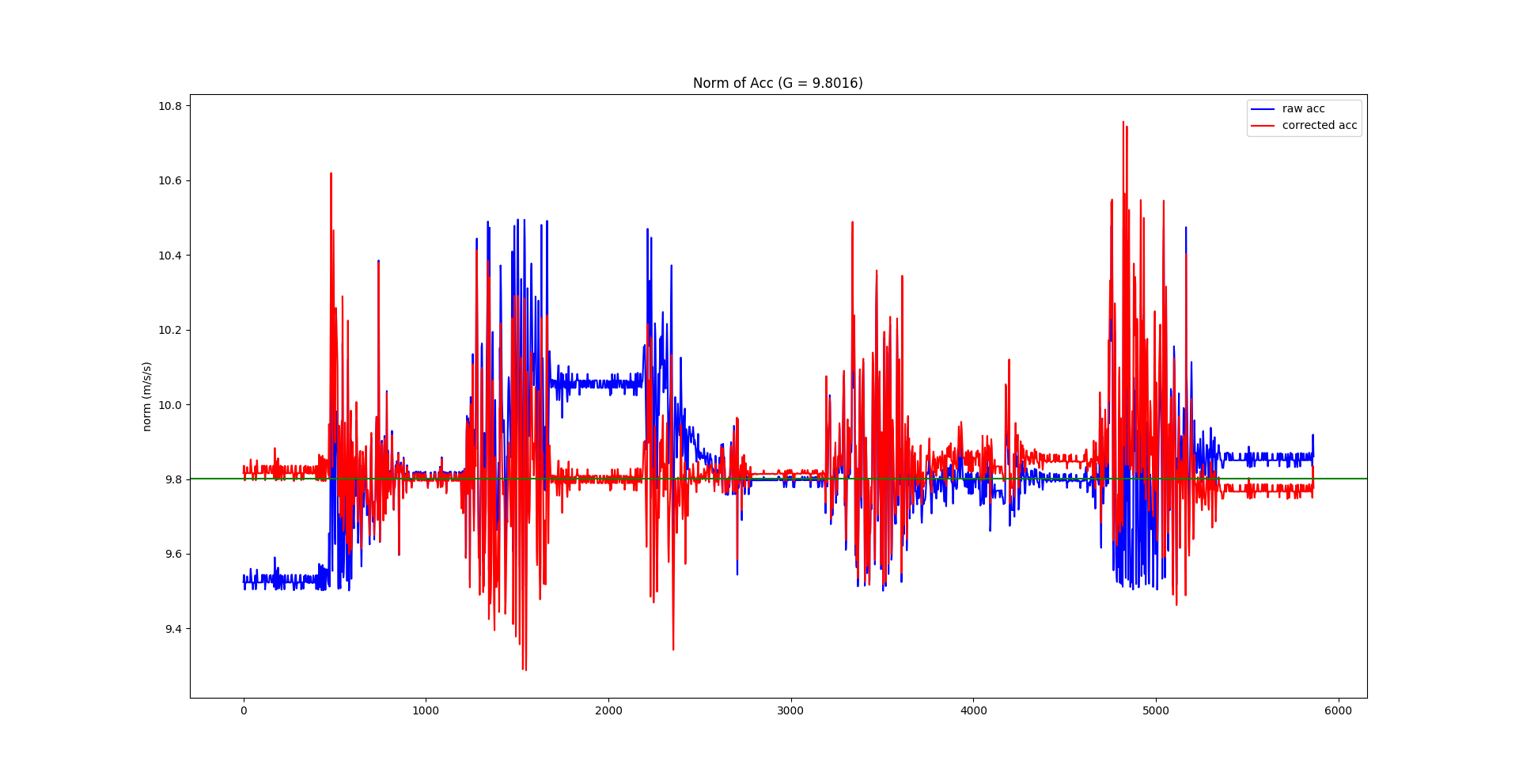
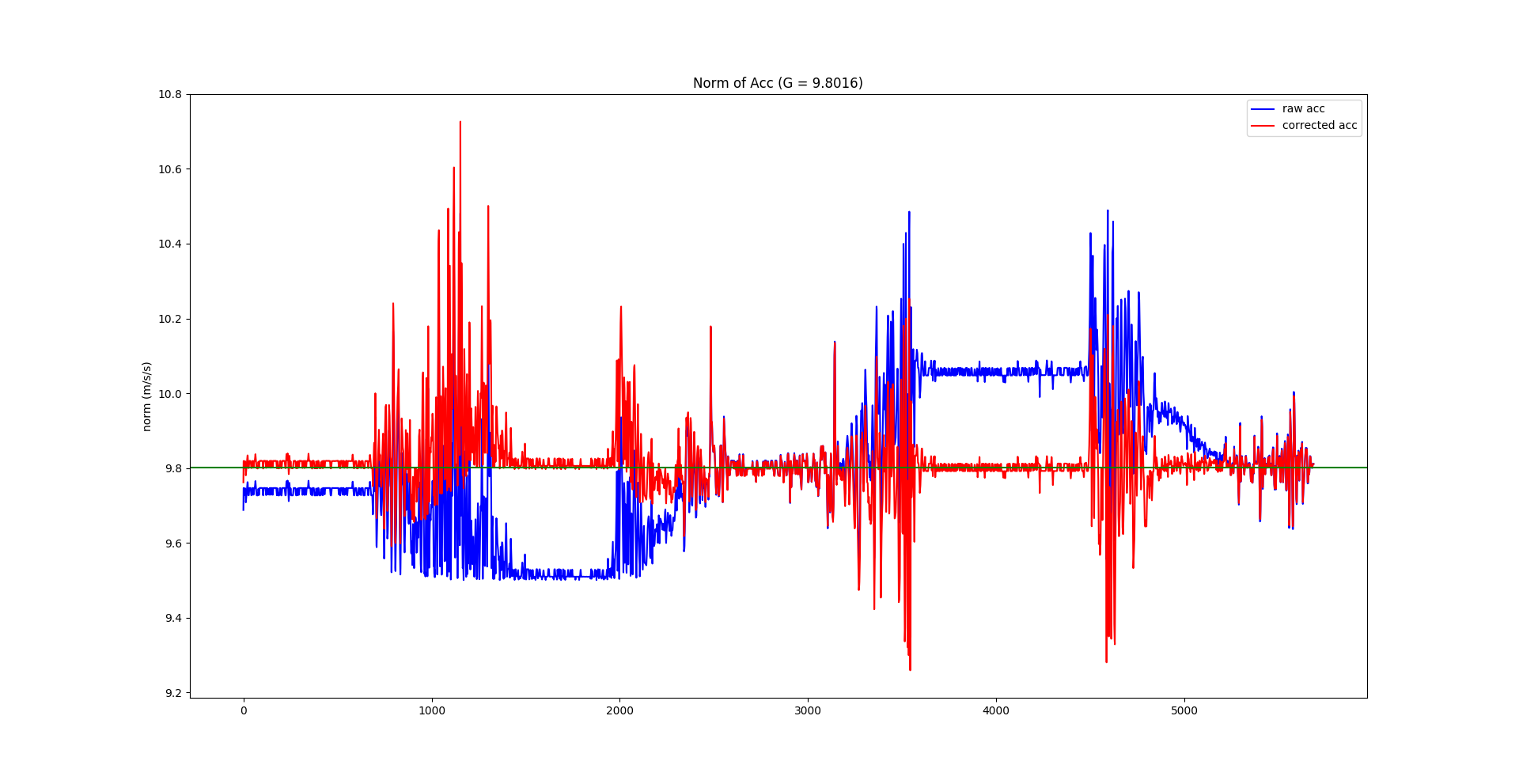
Correction
- code: https://github.com/cggos/imu_tools/tree/kinetic/imu_calib/imu_tk
Given a raw sensor reading X (e.g., the acceleration ), the calibrated "unbiased" reading X' is obtained.
\[x^\prime = T \cdot K \cdot (x - b)\]
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| Misalignment matrix:
T =
Scale matrix:
K =
Bias vector:
B =
X' = T*K*(X - B)
|
Accelerator