图像分析之ORB特征
Last updated on March 2, 2026 pm
[TOC]
Overview
- Oriented FAST + Rotated BRIEF
Feature/Corner Detector
- FAST方法 -- 定位特征点坐标
- 矩方法 -- 特征点方向
- 非极大值抑制 -- 特征点响应值(分数)
- 图像金字塔 -- 特征点具有 尺度不变性
Descriptor
- BRIEF -- 特征点描述子
- 特征点方向 -- 描述子具有 旋转不变性
oFAST: FAST Keypoint Orientation
Multiscale Image Pyramid
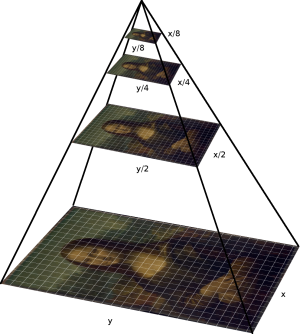
- level: 8
- scale: 1.2
- down sample: bilinear interpolation
- produce FAST features (filtered by Harris ???) at each level in the pyramid
FAST (Features from Accelerated and Segments Test)
- FAST-9: ≥ 9 contiguous pixels brighter than p+threshold
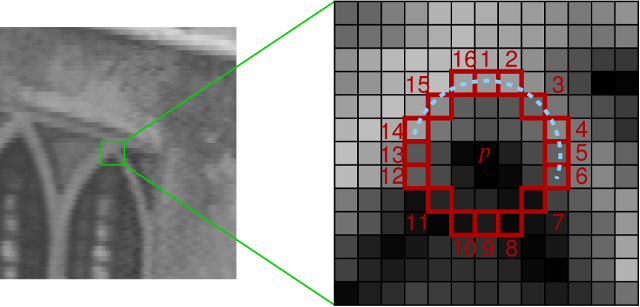
Procedure:
- Select a pixel p whose intensity is \(I_p\) and Select appropriate threshold value \(t\)
- the pixel p is a corner if there exists a set of \(n\) contiguous pixels in the circle (of 16 pixels) which are all brighter than \(I_p+t\), or all darker than \(I_p−t\)
- Rapid rejection by testing 1, 9, 5 then 13: First 1 and 9 are tested if they are too brighter or darker. If so, then checks 5 and 13
- If p is a corner, then at least three of these must all be brighter than \(I_p+t\) or darker than \(I_p−t\)
NMS (Non-Maximal Suppression)
非极大值抑制主要是为了避免图像上得到的“角点”过于密集,主要过程是,每个特征点会计算得到相应的响应得分,然后以当前像素点p为中心,取其邻域(如3x3 的邻域),判断当前像素p的响应值是否为该邻域内最大的,如果是,则保留,否则,则抑制。
Uniform Distribution (特征均匀化)
均匀化的方式一般有如下两种:
- Grid网格化
- K叉树
对于天空这种环境,Grid的方式提取的特征较少,不如K叉树的方式。
ORB-SLAM中使用 四叉树 DistributeOctTree() 来快速筛选特征点,筛选的目的是非极大值抑制,取局部特征点邻域中FAST角点相应值最大的点,而如何搜索到这些扎堆的的点,则采用的是四叉树的分快思想,递归找到成群的点,并从中找到相应值最大的点。
Orientation by Intensity Centroid (IC)
Rosin defines the moments of a patch as:
\[ m_{p q}=\sum_{x, y} x^{p} y^{q} I(x, y) \]
the first order moment of a patch \(I\) (patch size = 31)
\[ \begin{aligned} m_{10} &= \sum_{x=-15}^{15} \sum_{y=-15}^{15} x I(x, y) = \sum_{y=0}^{15} {\color{blue} \sum_{x=-15}^{15} x \left[ I(x,y) - I(x, -y) \right] } \\ m_{01} &= \sum_{x=-15}^{15} \sum_{y=-15}^{15} y I(x, y) = \sum_{y=1}^{15} {\color{blue} \sum_{x=-15}^{15} y \left[ I(x,y) - I(x, -y) \right] } \end{aligned} \]
the intensity centroid
\[ C=\left(\frac{m_{10}}{m_{00}}, \frac{m_{01}}{m_{00}}\right) \]
the orientation (the vector from the corner’s center to the centroid)

\[ \theta=\operatorname{atan} 2\left(m_{01}, m_{10}\right) \]
1
2
3
4
5
6
7
8
9
10
11
12const int PATCH_SIZE = 31;
const int HALF_PATCH_SIZE = 15;
int m01 = 0;
int m10 = 0;
for(int y=-half_patch_size; y<half_patch_size; ++y){
for(int x=-half_patch_size; x<half_patch_size; ++x){
m01 += y * image.at<uchar>(kp.pt.y+y, kp.pt.x+x);
m10 += x * image.at<uchar>(kp.pt.y+y, kp.pt.x+x);
}
}
kp.angle = std::atan2(m01, m10)/CV_PI*180.0;
Gaussian Filter
ref: 图像分析之高斯滤波
start by smoothing image using a Gaussian kernel at each level in the pyramid in order to prevent the descriptor from being sensitive to high-frequency noise
Gaussian Kernel size: 7x7, Sigma: 2
利用高斯滤波的可分离性,实现水平和垂直分开滤波,降低计算量,并进行定点化
rBRIEF: Rotation-Aware Brief
Brief of BRIEF (Binary robust independent elementary feature)
<img src="/img/post/image_features/brief.png"/>In brief, each keypoint is described by a feature vector which is 128–512 bits string.
vector dim = 256 bits (32 bytes)
each vector \(\longleftrightarrow\) each keypoint
for each bit, select a pair of points in a patch \(I\) which centered a corner \(\mathbf{p}\) and compare their intensity
\[ \mathbf{S}= \left(\begin{array}{l} \mathbf{p}_{1}, \ldots, \mathbf{p}_{n} \\ \mathbf{q}_{1}, \dots, \mathbf{q}_{n} \end{array}\right) \in \mathbb{R}^{(2 \times 2) \times 256} \]
\[ \tau(\mathbf{I} ; \mathbf{p}_i, \mathbf{q}_i):= \left\{\begin{array}{ll} 1 & : \mathbf{I}(\mathbf{p}_i) < \mathbf{I}(\mathbf{q}_i) \\ 0 & : \mathbf{I}(\mathbf{p}_i) \geq \mathbf{I}(\mathbf{q}_i) \end{array}\right. \]
the descriptor (each bit \(\longleftrightarrow\) each pair of points \((\mathbf{p}_i, \mathbf{q}_i)\)):
\[ f(n) = \sum_{i=1}^n 2^{i-1} \tau(\mathbf{I} ; \mathbf{p}_i, \mathbf{q}_i), \quad (n = 256) \]
steered BRIEF
为了具有旋转不变性,引入该算法,但方差很小、相关性高
\[ \mathbf{R}_{\theta} = \begin{bmatrix} \cos{\theta} & -\sin{\theta} \\ \sin{\theta} & \cos{\theta} \end{bmatrix} \]
\[ \mathbf{S}_{\theta}=\mathbf{R}_{\theta} \mathbf{S}= \left(\begin{array}{l} \mathbf{p}_{1}', \ldots, \mathbf{p}_{n}' \\ \mathbf{q}_{1}', \dots, \mathbf{q}_{n}' \end{array}\right) \]
rBRIEF
rBRIEF shows significant improvement in the variance and correlation over steered BRIEF
为了把steered BRIEF方差增大,相关性降低
基于统计规律,利用了贪心算法进行筛选
construct a lookup table of precomputed BRIEF patterns
1
2
3
4
5
6
7
8
9
10
11
12// construct a lookup table of precomputed BRIEF patterns
// 训练好的31*31邻域256对像素点坐标
static int ORB_pattern[256*4] = {
8, -3, 9, 5 /*mean (0), correlation (0)*/,
4, 2, 7,-12 /*mean (1.12461e-05), correlation (0.0437584)*/,
-11, 9, -8, 2 /*mean (3.37382e-05), correlation (0.0617409)*/,
7,-12, 12,-13 /*mean (5.62303e-05), correlation (0.0636977)*/
// .
// .
// .
}steered BRIEF
for each bit of the descriptors
\[ \mathbf{p}_i' = \mathbf{R}_{\theta} (\mathbf{p}_i-\mathbf{p}) + \mathbf{p} \\ \mathbf{q}_i' = \mathbf{R}_{\theta} (\mathbf{q}_i-\mathbf{p}) + \mathbf{p} \]
\[ \tau(\mathbf{I} ; \mathbf{p}_i', \mathbf{q}_i'):= \left\{\begin{array}{ll} 1 & : \mathbf{I}(\mathbf{p}_i') < \mathbf{I}(\mathbf{q}_i') \\ 0 & : \mathbf{I}(\mathbf{p}_i') \geq \mathbf{I}(\mathbf{q}_i') \end{array}\right. \]
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23double degRad = kp.angle/180.0*CV_PI;
double dcos = std::cos(degRad);
double dsin = std::sin(degRad);
vector<bool> d(256, false);
for (int i = 0; i < 256; i++) {
d[i] = 0;
int p_offset_x = ORB_pattern[4*i+0];
int p_offset_y = ORB_pattern[4*i+1];
int q_offset_x = ORB_pattern[4*i+2];
int q_offset_y = ORB_pattern[4*i+3];
double pu = kp.pt.x + (dcos*p_offset_x - dsin*p_offset_y);
double pv = kp.pt.y + (dsin*p_offset_x + dcos*p_offset_y);
double qu = kp.pt.x + (dcos*q_offset_x - dsin*q_offset_y);
double qv = kp.pt.y + (dsin*q_offset_x + dcos*q_offset_y);
int pI = image.at<uchar>((int)pv, (int)pu);
int qI = image.at<uchar>((int)qv, (int)qu);
d[i] = (pI>=qI) ? 0 : 1;
}
ORB Features in ORB-SLAM2
ORB特征点:
- 二维坐标(2自由度)
- 方向(灰度质心法,矩特征)
- 金字塔层级
- 不确定度(跟金字塔层级有关)
- 描述子
ORB描述子匹配:
- BoW
- 暴力匹配
- FLANN
ORB描述子匹配验证:
- 通过 描述子间的距离阈值(通过最小、最大距离设置) 筛选
- 特征点方向(图像块矩特征)一致性检查(直方图统计)
- 到极线的距离(给定 基础矩阵)
- 三维点
- SLAM中已关联三维点的有效性
- 视差检查(余弦距离)
- 三角化后三维点的有效性
- Z朝前
- 重投影误差(考虑 卡方分布,受自由度影响)