Observability and Inconsistency in a Nutshell
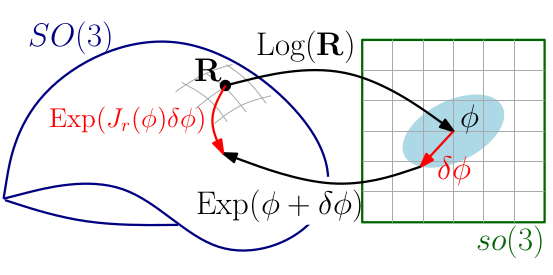
[TOC] Overview What is observability ? In control theory, observability is a measure for how well internal states of a system can be inferred by knowledge of its external outputs. What is consistenc