On-Manifold Optimization: Local Parameterization
Last updated on March 2, 2026 pm
Overview
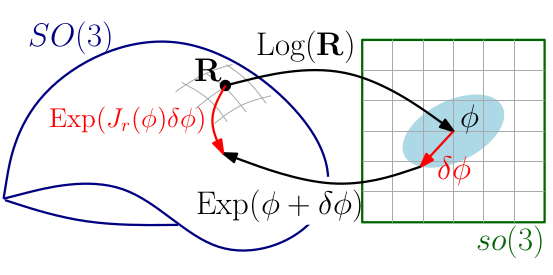
Manifold Space vs Tangent Space
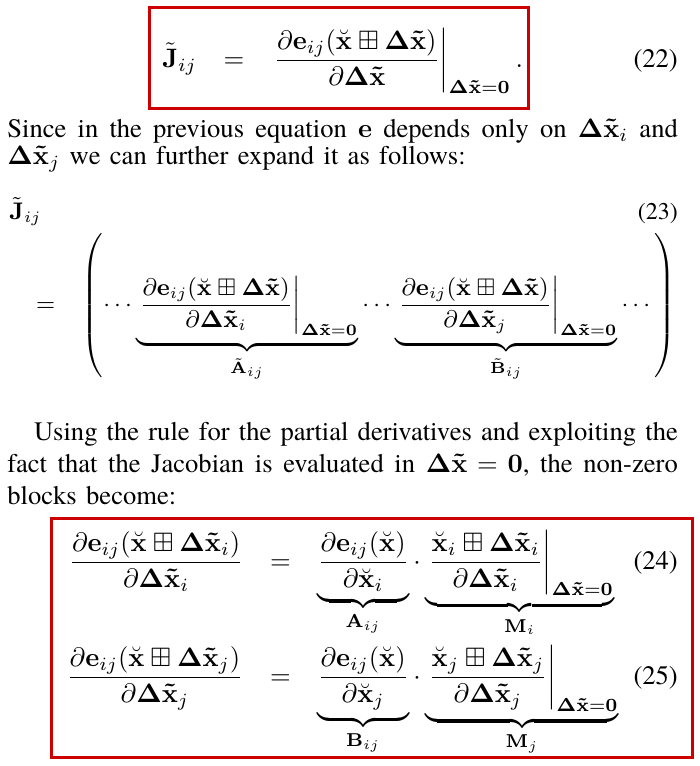
Jacobian w.r.t Error State
Jacobian w.r.t Error State vs True State
According [1] 2.4,
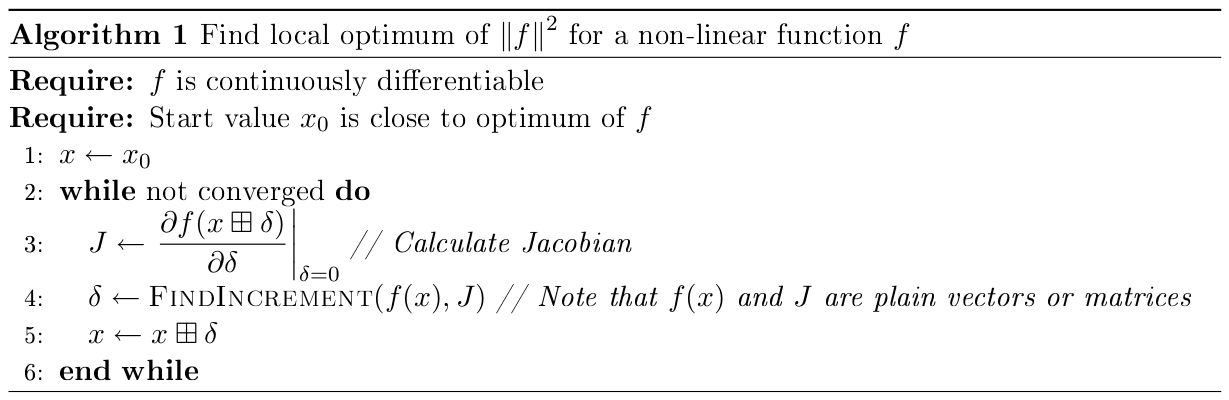
The idea is that for a \(x \in N\) the function \(g(\delta) := f (x \boxplus \delta)\) behaves locally in \(0\) like \(f\) does in \(x\). In particular \(\|f(x)\|^2\) has a minimum in \(x\) if and only if \(\|g(\delta)\|^2\) has a minimum in \(0\). Therefore finding a local optimum of \(g\), \(\delta = \arg \min_{\delta} \|g(\delta)\|^2\) implies \(x \boxplus \delta = \arg \min_{\xi} \|f(\xi)\|^2\).
\[ f(x \boxplus \delta)=f(x)+J_x \delta+\mathcal{O}\left(\|\delta\|^2\right) \]
where
\[ J = \left. \frac{\partial f(x \boxplus \delta)}{\partial \delta} \right|_{\delta=0} \quad \longleftrightarrow \quad J = \left. \frac{\partial f(x)}{\partial x} \right|_{x} \]
ESKF [2] 6.1.1: Jacobian computation
\[ \left.\mathbf{H} \triangleq \frac{\partial h}{\partial \delta \mathbf{x}}\right|_{\mathbf{x}}=\left.\left.\frac{\partial h}{\partial \mathbf{x}_t}\right|_{\mathbf{x}} \frac{\partial \mathbf{x}_t}{\partial \delta \mathbf{x}}\right|_{\mathbf{x}}=\mathbf{H}_{\mathbf{x}} \mathbf{X}_{\delta \mathbf{x}} \]
- \(x_t\): true state
- \(x\): normal state
- \(\delta x\): error state
lifting and retraction:
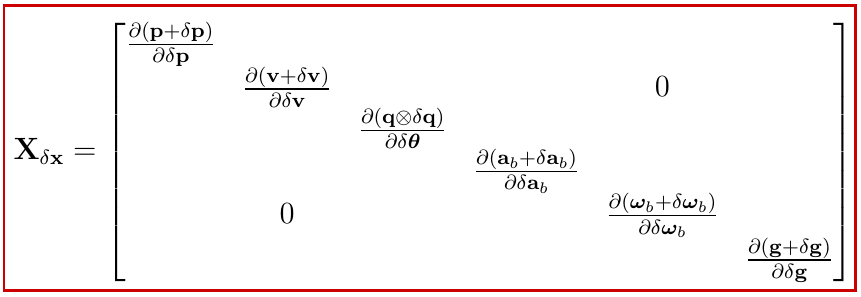
\[ \left.\mathbf{X}_{\delta \mathbf{x}} \triangleq \frac{\partial \mathbf{x}_t}{\partial \delta \mathbf{x}}\right|_{\mathbf{x}}=\left[\begin{array}{ccc} \mathbf{I}_6 & 0 & 0 \\ 0 & \mathbf{Q}_{\delta \boldsymbol{\theta}} & 0 \\ 0 & 0 & \mathbf{I}_9 \end{array}\right] \]
the quaternion term
\[ \begin{aligned} \left.\mathbf{Q}_{\delta \boldsymbol{\theta}} \triangleq \frac{\partial(\mathbf{q} \otimes \delta \mathbf{q})}{\partial \delta \boldsymbol{\theta}}\right|_{\mathbf{q}} &=\left.\left.\frac{\partial(\mathbf{q} \otimes \delta \mathbf{q})}{\partial \delta \mathbf{q}}\right|_{\mathbf{q}} \frac{\partial \delta \mathbf{q}}{\partial \delta \boldsymbol{\theta}}\right|_{\delta \hat{\boldsymbol{\theta}}=0} \\ &=\left.\left.\frac{\partial\left([\mathbf{q}]_L \delta \mathbf{q}\right)}{\partial \delta \mathbf{q}}\right|_{\mathbf{q}} \frac{\partial\left[\begin{array}{c} 1 \\ \frac{1}{2} \delta \boldsymbol{\theta} \end{array}\right]}{\partial \delta \boldsymbol{\theta}}\right|_{\hat{\delta}=0} \\ &=[\mathbf{q}]_L \frac{1}{2}\left[\begin{array}{lll} 0 & 0 & 0 \\ 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array}\right] \end{aligned} \]
Least Squares on a Manifold [3]
Local Parameterization in Ceres Solver [4] [5] [6] [7] [8]
1 | |
Plus
Retraction
\[ \boxplus(x, \Delta)=x \operatorname{Exp}(\Delta) \]
ComputeJacobian
global w.r.t local
\[ J_{GL} = \frac{\partial x_G}{\partial x_L} = D_2 \boxplus(x, 0) = \left. \frac{\partial \boxplus(x, \Delta)}{\partial \Delta} \right|_{\Delta = 0} \]
参考 [9]
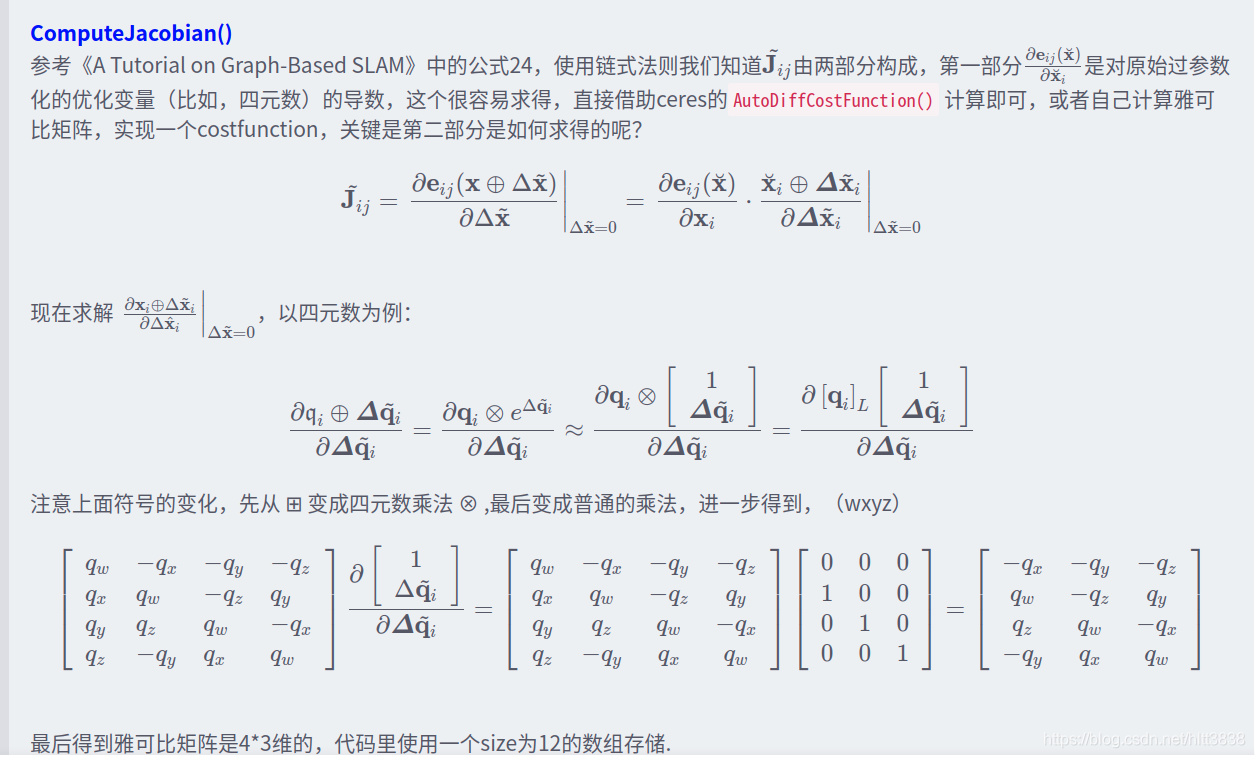
\(r\) w.r.t \(x_{L}\)
在 ceres::CostFunction 处提供 residuals 对 Manifold 上变量的导数
\[ J_{rG} = \frac{\partial r}{\partial x_G} \]
则 对 Tangent Space 上变量的导数
\[ J_{rL} = \frac{\partial r}{\partial x_L} = \frac{\partial r}{\partial x_G} \cdot J_{GL} \]
Sub Class
- QuaternionParameterization
- EigenQuaternionParameterization
自定义 QuaternionParameterization
参考 [7]
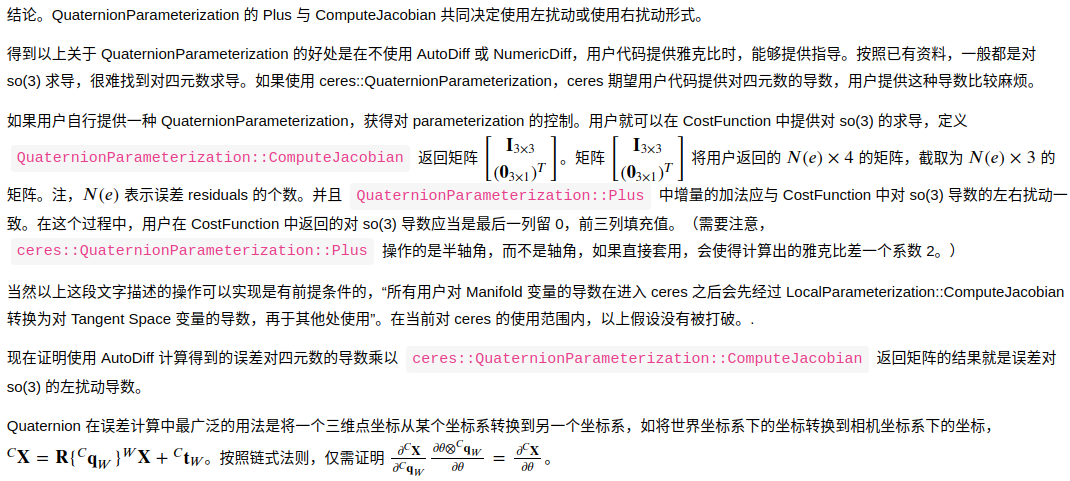
Summary
- QuaternionParameterization 的 Plus 与 ComputeJacobian 共同决定使用左扰动或使用右扰动形式
Quaternion in Eigen
1 | |
Quaternion in Ceres Solver
- order:
wxyz - Ceres Solver 中 Quaternion 是 Hamilton Quaternion,遵循 Hamilton 乘法法则
- 矩阵 raw memory 存储方式是 Row Major
Reference
- A Framework for Sparse, Non-Linear Least Squares Problems on Manifolds ↩︎
- Quaternion kinematics for the error-state Kalman filter, Joan Solà ↩︎
- A Tutorial on Graph-Based SLAM ↩︎
- http://ceres-solver.org/nnls_modeling.html#localparameterization ↩︎
- On-Manifold Optimization Demo using Ceres Solver ↩︎
- Matrix Manifold Local Parameterizations for Ceres Solver ↩︎
- [ceres-solver] From QuaternionParameterization to LocalParameterization 😄 ↩︎
- LocalParameterization子类说明:QuaternionParameterization类和EigenQuaternionParameterization类 ↩︎
- 优化库——ceres(二)深入探索ceres::Problem ↩︎