Observability and Inconsistency in a Nutshell
Last updated on March 2, 2026 pm
[TOC]
Overview
What is observability ?
In control theory, observability is a measure for how well internal states of a system can be inferred by knowledge of its external outputs.
What is consistency ?
A recursive estimator is consistent when the estimation errors are zero-mean and have covariance matrix equal to that reported by the estimator.
Observability \(\longrightarrow\) Consistency
Mismatch (actual vs true) in observability \(\longrightarrow\) Inconsistency
VINS observability properties \(\longrightarrow\) estimator inconsistency
Basics
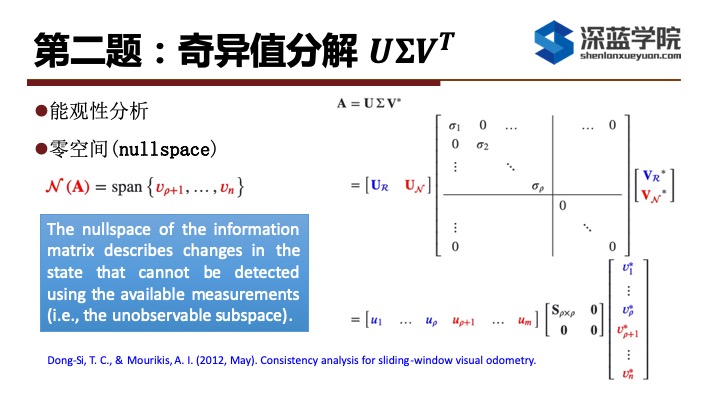
Nullspace [1]
Lie Derivative [2]
已知,光滑标量函数 \(h\) 以及 光滑向量场 \(f\) 和 \(g\)
\[ \begin{aligned} h(x):& \; R^n \rightarrow R \\ f(x):& \; R^n \rightarrow R^n \\ g(x):& \; R^n \rightarrow R^n \end{aligned} \]
行向量 梯度 \(\nabla h\) 乘以 向量场 \(f\),其结果 \(L_f h\) 正好是个标量
\[ L_f h = \nabla h \cdot f = \left( \frac{\partial h}{\partial x} \right)^T f \]
\(L_g L_f h\) 结果依然是个标量
\[ L_g L_f h = L_g (L_f h) = \nabla(L_f h) g = \left( \frac{\partial (L_f h)}{\partial x} \right)^T g = \left( \frac{\partial \left( (\frac{\partial h}{\partial x})^T f \right)}{\partial x} \right)^T g \]
总结一下:Lie Derivative与一般的Derivative的区别是,Lie Derivative是定义在两个函数 \(h\) 和 \(f\) 之间的,它俩都是向量 \(x\) 的函数,通过共同的 \(x\) 联系起来;一般的Derivative是某个函数对 \(x\) 定义的。
Observability Analysis [4]
what: 控制理论中的 可观察性(observability)[3] 是指系统可以由其外部输出推断其内部状态的程度。
why: 为了能让系统不可观的维度与真实系统一致,从而提高系统精度
how: 通过计算可观性矩阵,分析其零空间的秩,来分析系统哪些状态维度可观/不可观;可观性矩阵对应系统可观测的维度,零空间对应系统不可观的维度
Unobservable DoF (Gauge Freedom) in SLAM
- Mono vSLAM: 7
- 6 DoF 绝对位姿 + 尺度
- Stereo vSLAM: 6
- 6 DoF 绝对位姿
- Mono + IMU SLAM: 4
- 3 DoF 绝对位置 + 绝对yaw角
- roll 和 pitch 由于重力的存在而可观,尺度因子由于加速度计的存在而可观
Observability Matrix
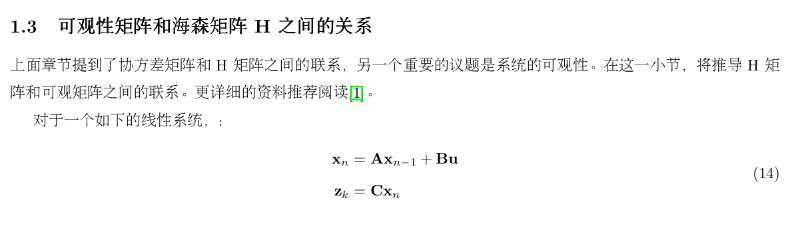
Discrete state space equations of nonlinear systems (linearized without considering noise) is
\[ \begin{cases} x_{k+1} = \Phi_k x_k \\ y_k = H_k x_k \end{cases} \]
according to the Lie derivative, the observability matrix is
\[ \mathbf{\mathcal{O}} \left(\mathbf{x}^{\star}\right) = \left[ \begin{array}{c} \mathbf{H}_{1} \\ \mathbf{H}_{2} \boldsymbol{\Phi}_{2,1} \\ \vdots \\ \mathbf{H}_{k} \boldsymbol{\Phi}_{k, 1} \end{array} \right] \]
then, the unobservable dimensions of the system are
\[ \text{rank}(N(\mathcal{O})) \]
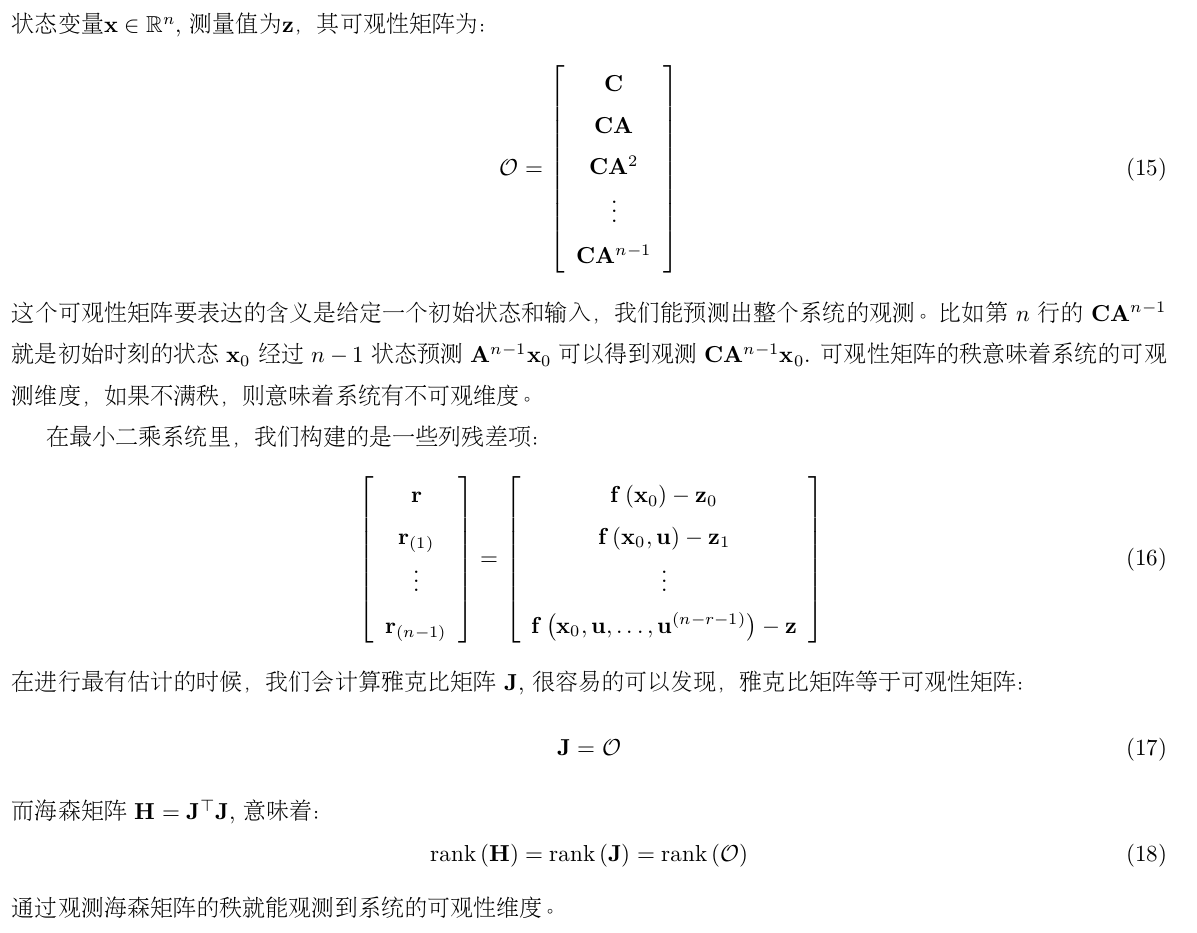
Observability Matrix vs Hessian(Information) Matrix
对于SLAM系统而言(如单目VO),当我们改变状态量时,测量不变意味着损失函数不会改变,更意味着求解最小二乘时对应的信息矩阵H存在着零空间。
for the monocular VO based on optimization methods, the dimension of null space of the Hessian (Information) matrix \(H\) is 7, that is, the unobservable dimensions are
\[ \text{rank}(N(H)) = 7 \]
\[ J^T J \Delta x = - J^T r \quad \longrightarrow \quad H \Delta x = b \]
What is the relationship between the Hessian matrix \(H\) and the observability matrix \(\mathcal{O}\) in the optimization based VO/VIO ?
- paper: Observability-Based Guidance and Sensor Placement (Chapter 2 - OBSERVABILITY MEASURES) > As a note, the measurement Jacobian, \(dY\), is equivalent to the observability matrix, \(d\mathcal{O}\), evaluated at a nominal state, \(x_0\).
贺一家博士给的总结:
NEES (normalized estimation error squared)
- NEES closer to 6 for VIO
Inconsistency of Estimator
a state estimator is consistent if the estimation errors (i) are zero-mean, and (ii) have covariance matrix smaller or equal to the one calculated by the filter.
Degeneracy (Insufficient Restraint) / Inconsistency in SLAM
Motion
- constant acceleration
- pure translation
Structure
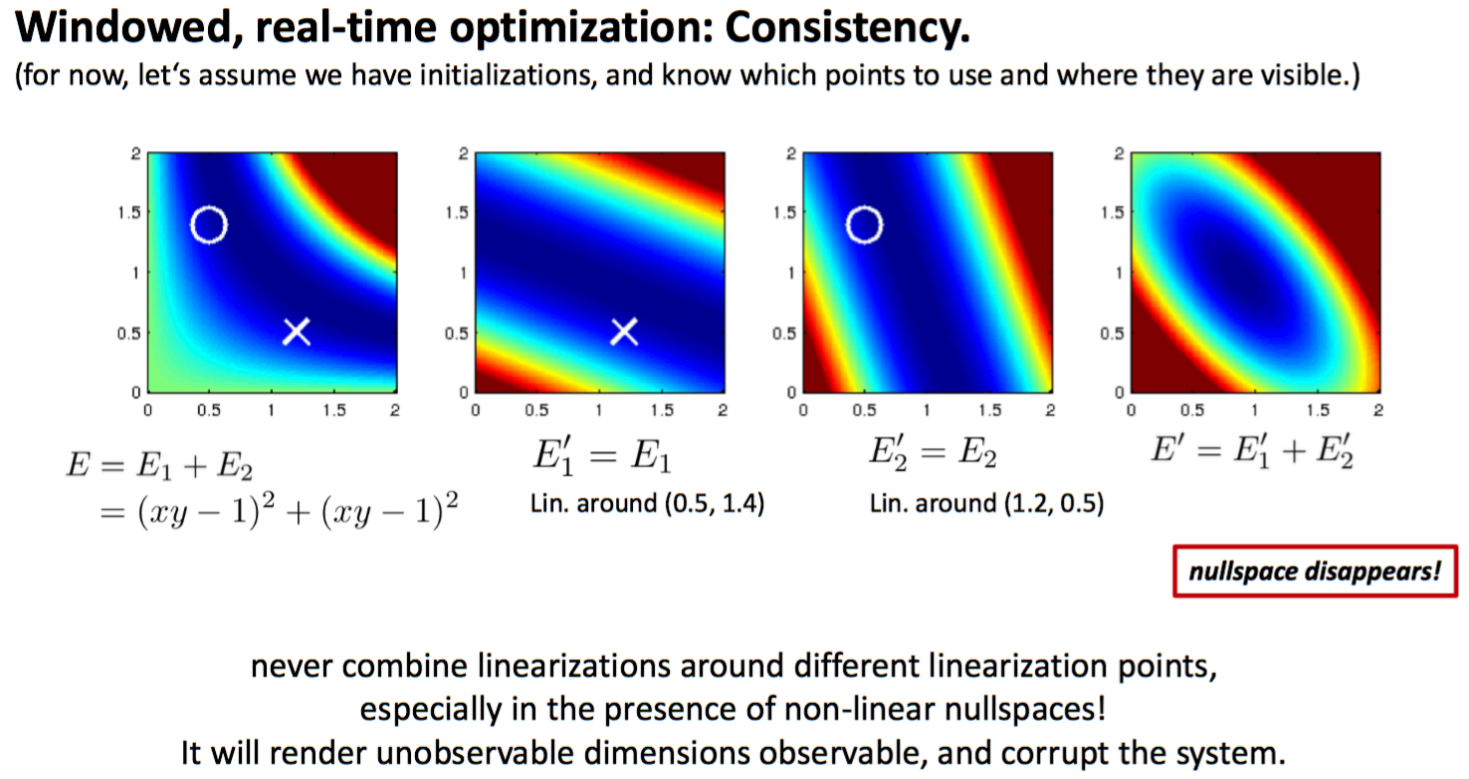
Maintain(Solve) Consistency(Inconsistency)
open_vins #171: Consistency maintenance methods, FEJ vs Observability-constrained(OC) ones
paper:
- VINS on Wheels
- Odometry measurements
- Planar-motion constraints
FEJ (First-Estimate Jacobians)
paper: A First-Estimates Jacobian EKF for Improving SLAM Consistency
estimation from the first time
to ensure that the state transition and Jacobian matrices are evaluated at correct linearization points such that the above observability analysis will hold true
FEJ 算法:不同残差对同一个状态求雅克比时,线性化点必须一致,这样就能避免零空间退化而使得不可观变量变得可观。
app:
- OKVIS
- DSO
- ElasticFusion 改进版 (IROS2107, Stefan Leutenegger)
- OpenVINS
ref:
- 如何理解SLAM中的First-Estimates Jacobian?
- FEJ经典论文中的EKF SLAM的error-state equation的推导过程
- VSLAM之边缘化 Marginalization 和 FEJ (First Estimated Jocobian)
FEJ2
TODO
Observability Constraint (OC)-VINS
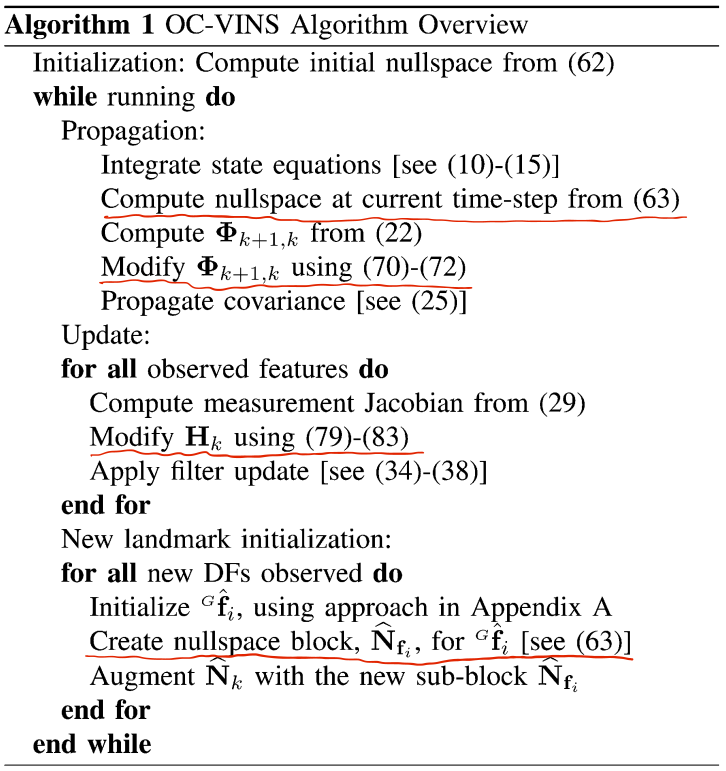
App: OC-MSC-KF
MSCKF-VIO (S-MSCKF):
Modification of the State Transition Matrix \(\Phi\)
1 | |
Modification of the Measurement Jacobian \(H\)
1 | |
Gauge Freedom Handling
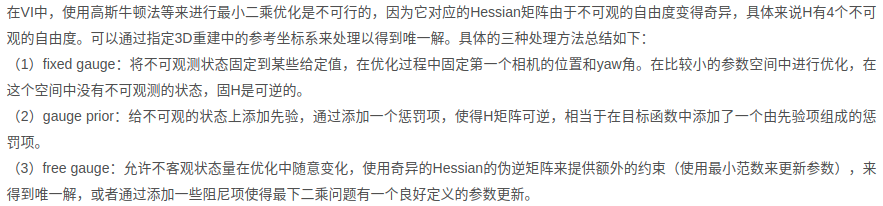
It is well known that visual-inertial systems have four degrees of freedom that are not observable: the global position and the rotation around gravity. These unobservable degrees of freedom (called gauge freedom) have to be handled properly in visual-inertial state estimation to obtain a unique state estimate.
- paper: On the Comparison of Gauge Freedom Handling in Optimization-based Visual-Inertial State Estimation
- code: Covariance Transformation for Visual-Inertial Systems
H有正确的零空间,比如,对于单目VO,rank(N(H)) = 7,则H为奇异矩阵,那么增量方程始终存在病态或求解不稳定问题;通过处理 规范自由度 解决。
In optimization-based methods, three approaches are usually used:
- Gauge Fixation: fixing the initial state,
- Gauge Prior: adding a prior to the initial state,
- Free Gauge: allowing the parameters to evolve freely during optimization.

ref:
FAQ
- 为什么位置不可观,对于单目VO,第一帧不是固定住了吗?