图像空间域分析之图像统计特征 [TOC] 我们可以将一幅数字图像视为一个 二维函数\(I(x,y)\) ,其中x和y是空间坐标,在x-y平面中的任意空间坐标 \((x,y)\) 上的 幅值 \(I_{xy}\) 称为该点 图像的灰度、亮度或强度。 \[ I_{x,y} = I(x,y); \] 下面以 \(I_{xy}\) 作为随机变量,分析二维数字图像的 统计特征。 数学期望 数学期望(Expectation) 就是随机变量 2018-11-30 Computer Vision #Computer Vision #DIP #Image Moment
3D欧式变换理论与实践 [TOC] Overview 三维空间中的变换主要分为如下几种: 射影变换 仿射变换 相似变换 欧式变换 其性质如下图所示: 本文主要介绍欧式变换。 欧式变换 \[ \mathbf{T} = \begin{bmatrix} \mathbf{R} & \mathbf{t} \\ \mathbf{0}^T & 1 \end{bmatrix} \in \mathbb{R}^{4 2018-11-24 Kinematics #Kinematics #Euclidean Transform
YUV(NV21)图像数据到RGB颜色空间的转换 [TOC] 本文主要介绍YUV_NV21颜色空间到RGB(BGR in OpenCV)颜色空间的转换,并给出示例代码,另附YUV图像查看工具。 NV21(YUV420)介绍 NV12和NV21属于YUV420格式(每2x2四个Y,共用一组uv),是一种two-plane模式,即Y和UV分为两个Plane,但是UV(CbCr)为交错存储,而不是分为三个plane。先存储所有的Y,然后UV交错存储:N 2018-11-18 Computer Vision #Computer Vision #DIP #Image Color Space #YUV
Kalibr 之 Camera-IMU 标定 (总结) [TOC] Overview ethz-asl/kalibr is a toolbox that solves the following calibration problems: * Multiple camera calibration: intrinsic and extrinsic calibration of a camera-systems with non-globally 2018-10-23 MSF #Multi-Sensor Fusion #Sensor Calibration #Camera Calibration #IMU Calibration
Raspberry Pi Overview raspberrypi.org Raspbian RPi Hub Raspberry-at-home 树莓派实验室 树莓派论坛 树莓派吧 RPi Hardware Piddlerintheroot RPi.jpg 开机篇 – 树莓派 Raspberry Pi Model B+ 入手折腾记 (1) 树莓派3B上手(无显示器) 树莓派新手入门教程 (阮一峰) 有哪些对树莓派的有趣改造和扩 2018-10-18 DevOps #ARM #Embedded #Raspberry Pi
Ubuntu 16.04 下 ARM 远程调试环境搭建 安装 交叉编译工具 g++-arm-linux-gnueabi 1sudo apt install g++-arm-linux-gnueabi 下载gdb源码:http://ftp.gnu.org/gnu/gdb/,我下载的版本为 gdb-7.11.1.tar.gz,解压 安装 交叉编译工具 arm-linux-gdb 1234cd gdb-7.11.1./configure --target= 2018-10-18 DevOps #Cpp #Debug #ARM #Cross Compilation #Embedded #GDB
Ubuntu 16.04 下 RGBDSLAM-v2 的安装和使用 简介 RGBD-SLAM-v2 is a state-of-the-art SLAM system for RGB-D cameras, e.g., the Microsoft Kinect. You can use it to create highly accurate 3D point clouds or OctoMaps. RGBDSLAMv2 is based on the ROS pr 2018-10-14 SLAM #Visual SLAM
StereoScan(libVISO2) 学习笔记 Overview LIBVISO2 (Library for Visual Odometry 2) is a very fast cross-platfrom (Linux, Windows) C++ library with MATLAB wrappers for computing the 6 DOF motion of a moving mono/stereo camera. The st 2018-09-09 SLAM #Visual SLAM
Python Tricks 列表生成式 将两个嵌套for循环写成一个列表生成式,如 有一个嵌套列表,a=[[1,2],[3,4],[5,6]],要提取列表里的每一个元素 for循环处理 1234for i in a: for j in i: print(j)# output: [1, 2, 3, 4, 5, 6] 列表生成式 123b = [j for i in a for j in i] # 注意两个for 2018-08-02 DevOps #Python
Linux 平台 C++ 程序调试 [TOC] Overview GNU Binutils 定位函数名 建立main.c文件,内容如下: 1234#include <stdio.h>void main() { int a = 5/0;} 编译 main.c: 1gcc -g main.c 生成a.out文件 执行 .\a.out, 出现如下错误信息: Floating point exception (cor 2018-05-01 DevOps #Cpp #Linux #Debug
17 Equations That Changed The World The image is from the book "17 Equations That Changed The World.”, which written by mathematician and science author Ian Stewart and published in 2013. 2018-04-06 Maths
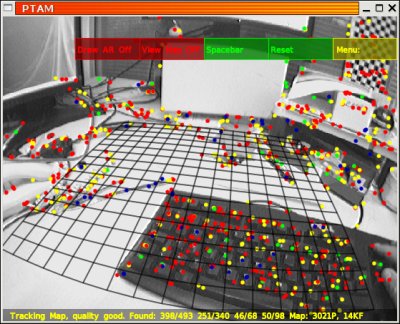
PTAM笔记 [TOC] 概述 PTAM,全称 Parallel Tracking And Mapping,是最早提出将Tracking和Mapping分开作为两个线程的一种SLAM算法,是一种 基于关键帧 的 单目视觉SLAM算法。PTAM主要分为这几部分: Track线程 FAST特征提取 地图初始化 跟踪定位 选取添加关键帧到缓存队列 重定位 Map线程 局部 Bundle Adjustme 2018-02-12 SLAM #Visual SLAM #ESM Tracking #Image Warping
OpenCV编译安装配置总结 [TOC] Overview check version from source 1modules/core/include/opencv2/core/version.hpp check informations after installation 12345678# 查看opencv版本pkg-config --modversion opencv# 查看opencv包含目录pkg-confi 2017-10-11 Computer Vision #Computer Vision #OpenCV
世界上最伟大的十个公式 英国科学期刊《物理世界》曾让读者投票评选了“最伟大的公式”,最终榜上有名的十个公式既有无人不知的1+1=2,又有著名的E=mc2;既有简单的圆周公式,又有复杂的欧拉公式…… 从什么时候起我们开始厌恶数学?这些东西原本如此美丽,如此精妙。这个地球上有多少伟大的智慧曾耗尽一生,才最终写下一个等号。每当你解不开方程的时候,不妨换一个角度想,暂且放下对理科的厌恶和对考试的痛恨。因为你正在见证的,是科学的美 2017-09-01 Maths
Computer Vision Libraries libCVD libCVD is a very portable and high performance C++ library for computer vision, image, and video processing. 12# libCVDlink_libraries( cvd ) OpenGL Suits 12345# OpenGLfind_package(OpenGL REQUIR 2017-08-24 Computer Vision #Computer Vision
Matlab 生成 DLL文件 与 C++ 混合编程 [TOC] 编写Matlab函数文件,例如 CircleDetect.m 12function [accum, circen, cirrad] = CircleDetect(imggray)...... 选择编译器 mex -setup,选择VS2010编译器 选择builder mbuild -setup,选择VS2010 builder 生成.h、.lib、.DLL等文件 1mcc -W c 2017-08-01 DevOps #Cpp #Matlab
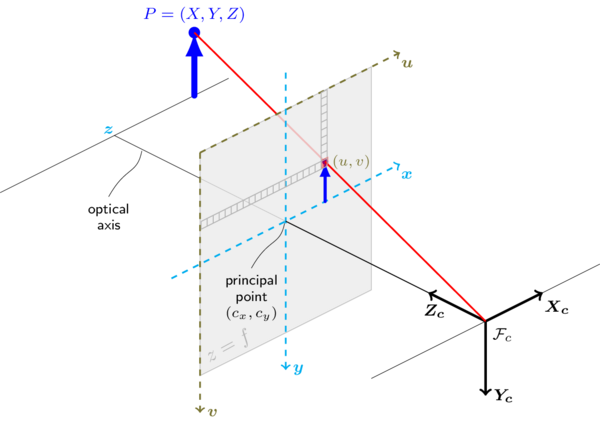
Pinhole Camera Model [TOC] 成像流水线 针孔相机模型 相机将三维世界中的坐标点(单位:米)映射到二维图像平面(单位:像素)的过程能够用一个几何模型来描述,其中最简单的称为 针孔相机模型 (pinhole camera model) ,其框架如下图所示。 世界坐标系中三维点 \(M=[X,Y,Z]^T\) 和 像素坐标系中二维点 \(m=[u,v]^T\) 的关系为: \[ s\tilde{m} = A 2017-07-02 Computer Vision #Computer Vision #Camera #Camera Model
基于数字光栅投影的结构光三维测量技术 [TOC] 概述 本文是在读了论文《基于数字光栅投影的结构光三维测量技术与系统研究》[1]之后做的学习总结,方便自己学习,同时与博友共享,共同提高! 三维重建 & 三维测量 三维重建 三维重建(3D Reconstruction)是指利用二维投影恢复物体三维信息的数学过程和计算机技术,包括数据获取、预处理、点云拼接和特征分析等步骤。 三维重建过程:图像获取、摄像机标定、特征提取、立体匹配和 2017-06-18 Computer Vision #3D Reconstruction #Computer Vision #Stereo Vision
[Book Reading]《史上最强脑力操》 数字模式 9的魔力:n * 9 * 12345679 = n * 111 111 111 递增相等:1+2=3;4+5+6=7+8; 链式速算 交叉线图 拉丁方块、数独 数谜 数列:裴波那契数列 费马定理 孟缇大厅难题 质数的安全性:安全系统 密码学:谜题密码机 混沌理论:在系统中的微小变化能够引起一连串不成比例的巨大后果,蝴蝶效应 分形:科赫雪花 黄金比例 圆周率:(前15位,每个单词的字母数) 2016-08-06 Reading #Reading