Ubuntu 16.04 下 Android 开发环境 [TOC] Overview in ~/.bashrc(or /etc/profile or /etc/environment) 1234567891011export JAVA_HOME=/home/cg/tools/android_tools/jdk1.8.0_251export JRE_HOME=$JAVA_HOME/jreexport CLASSPATH=.:$JAVA_HOME/lib 2020-05-23 DevOps #Android
Android Issues 总结 [TOC] http://stackoverflow.com/questions/8744994/android-camera-set-resolution http://stackoverflow.com/questions/10913181/camera-preview-is-not-restarting http://stackoverflow.com/questions/1091368 2020-05-23 DevOps #Android
Ubuntu 16.04 下 构建 Android(NDK) 应用 [TOC] NDK Build Generate .so or .a files using NDK tools: Edit .java file; Generate header file for the java file using JDK tools javac and javah; 123# 在 `src` 目录下javac com/ndk/test/OpenCVTest.javaja 2020-05-23 DevOps #Android #ARM #Android NDK #Cpp
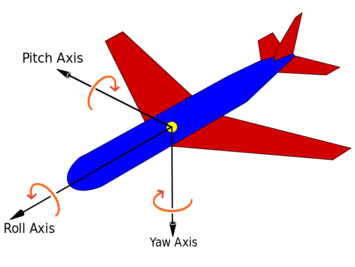
3D欧式变换之旋转ABC Overview 旋转转换 Maths - Rotation conversions ptam_cg/src/Tools.cc 旋转表示 旋转矩阵 (Rotation Matrix) \[ \mathbf{R} = \begin{bmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} 2020-04-03 Kinematics #Kinematics #Lie Theory #Quarternion #Euclidean Transform
Camera Calibration and Rectification [TOC] Overview What Is Camera Calibration? Camera Calibration Matlab Calibrating the VI Sensor 张氏法相机标定 Multi-Camera Self-Calibration LIBCBDETECT: Corner and Checkerboard Detection: MATLAB code for fu 2020-03-09 Computer Vision #Computer Vision #Sensor Calibration #Camera Calibration
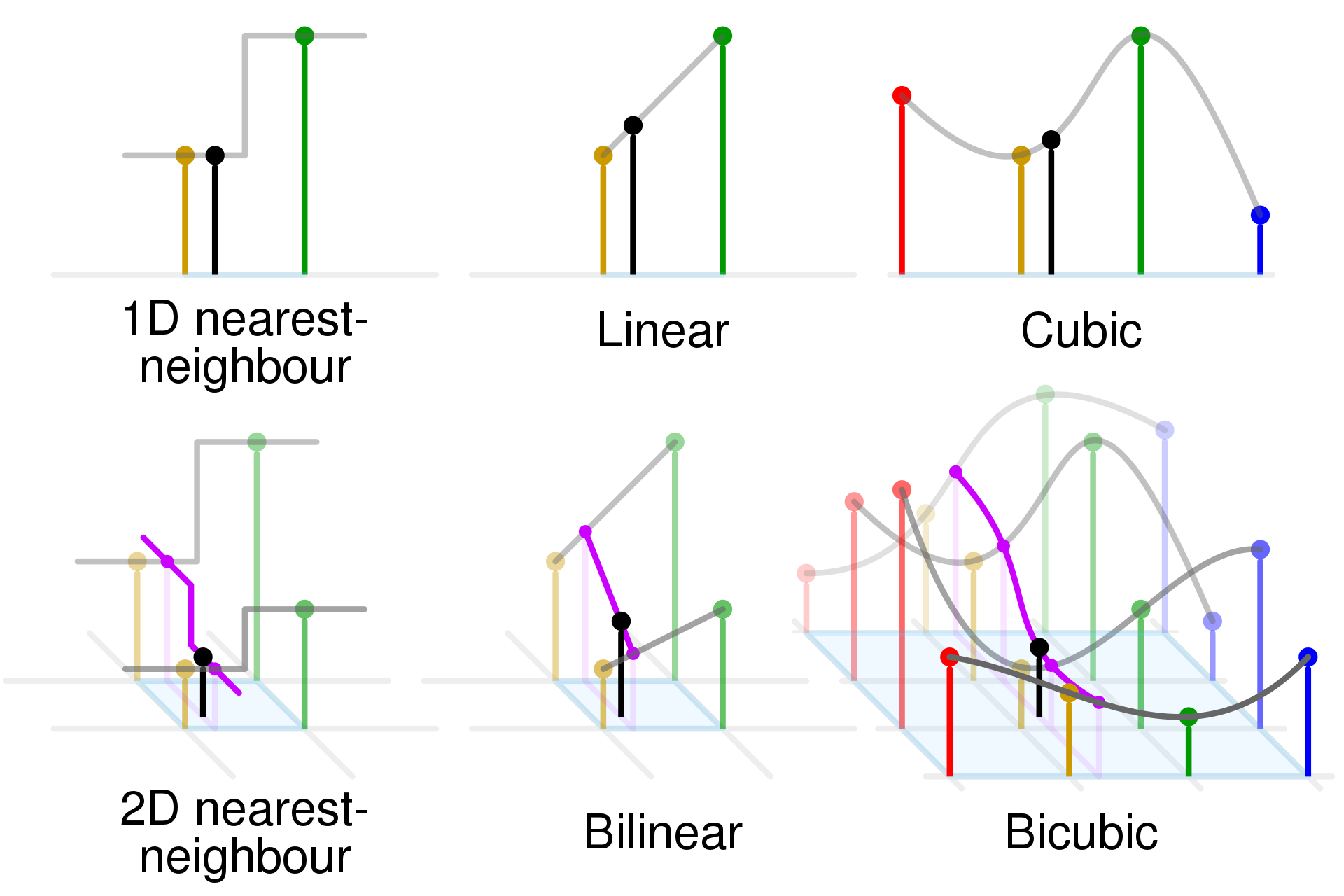
插值、拟合、积分 [TOC] Overview 插值:求过已知有限个数据点的近似函数。 拟合:已知有限个数据点,求近似函数,不要求过已知数据点,只要求在某种意义下它在这些点上的总偏差最小。 插值和拟合都是要根据一组数据构造一个函数作为近似,由于近似的要求不同,二者的数学方法上是完全不同的。而面对一个实际问题,究竟应该用插值还是拟合,有时容易确定,有时则并不明显。 插值 Comparison of 1D and 2020-03-09 Maths #Numerical Analysis #Interpolation #Spline
图片解析度 (DPI of Image) Overview [1] 图片的解析度即每英寸图像所包含的像素数量(1 英寸=2.54厘米), 一般以PPP(法语:points par pouce)或者DPI (英语:dots per inch)为单位。像素(或者点)越多,图像包含的信息越多(越精确)。例如,300dpi的解析度代表图片在其宽度和高度上各有300像素,因此一共有90 000 像素(300x300 dpi)。 根据这个公式,很容易 2020-03-07 DevOps #Academic #Image DPI #EXIF #ImageMagick
Sensor Calibration Overview mikeferguson/robot_calibration: Generic calibration for robots pangfumin/odom_extrinsic_calibrate: Odom intrinsic and odom-sensors extrinsic calibration on SE2 using batch optimization Spatial Hand- 2020-02-17 MSF #Sensor Calibration #Multi-Sensor Fusion
机器人自主定位导航 概述 [TOC] Overview 服务机器人究竟是如何实现自主定位导航的? 在实现自主导航之前,移动机器人都有哪些避障方法? 机器人自主移动的四大核心功能: 环境构建 自主导航(室内定位、智能避障、路径规划等) 智能跟随 自主回充 SLAM & 自主导航 自主导航,从大的方面来讲包括局域导航和全局导航两部分。 局域导航是指通过视觉、雷达、超声波等传感器实时获取当前环境信 2020-02-17 Robotics
IMU数据仿真公式推导及代码实现 [TOC] IMU测量模型(离散时间) IMU测量模型: \[ \begin{aligned} {\omega}_m &= \omega + b_{gd} + n_{gd} \\ a_m &= a + b_{ad} + n_{ad} \end{aligned} \] 其中, 离散时间的 Bias: \[ \begin{aligned} b_{gd}[k] &= b_{gd} 2020-01-09 INS #INS #IMU #Simulation
Ubuntu 16.04 下 VINS-Kidnap(Docker) 的安装和使用 [TOC] Overview HKUST-Aerial-Robotics/VINS-kidnap: VINS-Fusion with Cerebro vins kidnap安装使用 Install Nvidia Drive and CUDA ubuntu上安装NVIDIA驱动和cuda9.0,及NVIDIA-Docker Install Docker and Nvidia-Docker 2019-12-18 SLAM #Visual SLAM #VIO #Robot Kidnap #Docker
Maplab 学习笔记 [TOC] Overview ethz-asl/maplab: An open visual-inertial mapping framework. Maplab Framework Typical workflow Online ROVIOLI frontend Offline maplab console a convenient console user interf 2019-10-10 SLAM #Visual SLAM #VIO
S-MSCKF 论文公式推导与代码解析 [TOC] Overview Alg. PDF: Formula Derivation and Code Analysis of S-MSCKF Code: 本文 1. ImageProcessor initialize loadParameters create FastFeatureDetector imuCallback imu_msg_buffer.push_back(*msg) 2019-09-01 SLAM #Visual SLAM #VIO #MSCKF
Multi-Sensor Fusion: LiDAR and Radar fusion based on EKF [TOC] Overview 代码:lidar_radar_ekf_fusion System State Vector \[ x = [p_x, p_y, v_x, v_y]^T \in \mathbb{R}^{4 \times 1} \] State Transition & Measurement Function State transition function: \[ x^ 2019-08-28 MSF #Multi-Sensor Fusion #Kalman Filter #EKF
Multi-Sensor Fusion: IMU and GPS loose fusion based on ESKF [TOC] Overview 代码:imu_x_fusion System State Vector the nominal-state \(\mathbf{x}\) and the error-state \(\delta \mathbf{x}\) \[ \mathbf{x} = \begin{bmatrix} \mathbf{p} \\ \mathbf{v} \\ \math 2019-08-28 MSF #Multi-Sensor Fusion #Kalman Filter #ESKF
Least Squares Problem [TOC] 最小二乘问题 最小二乘问题(Least Squares Problem),即 \[ \min_{\mathbf{x}} \mathbf{F}(\mathbf{x}) = \frac{1}{2} {\|\mathbf{f}(\mathbf{x})\|}^2_2 \] 其中,\(\mathbf{F}(\mathbf{x})\) 为 目标函数,\(\mathbf{f}(\mathbf{x}) 2019-08-20 Maths #Optimization
RTAB-Map 学习笔记 version: 0.11.13-kinetic RTAB-Map (Real-Time Appearance-Based Mapping) is a RGB-D, Stereo and Lidar Graph-Based SLAM approach based on an incremental appearance-based loop closure detector. RTAB-Map 2019-08-08 SLAM #Visual SLAM
Autonomous Driving Overview [TOC] Overview Deepdrive is an open simulation platform built to accelerate progress and increase transparency in self-driving AI. BerkeleyDeepDrive: We seek to merge deep learning with automotiv 2019-07-28 Robotics #Autonomous Driving
百度Apollo课程学习笔记 [TOC] Overview the note is from Apollo Self-Driving Car Lesson Self-Driving Overview why need self-driving car 5 driving levels self-driving car history how self-driving car work hardware 2019-07-27 Robotics #Autonomous Driving #Baidu Apollo