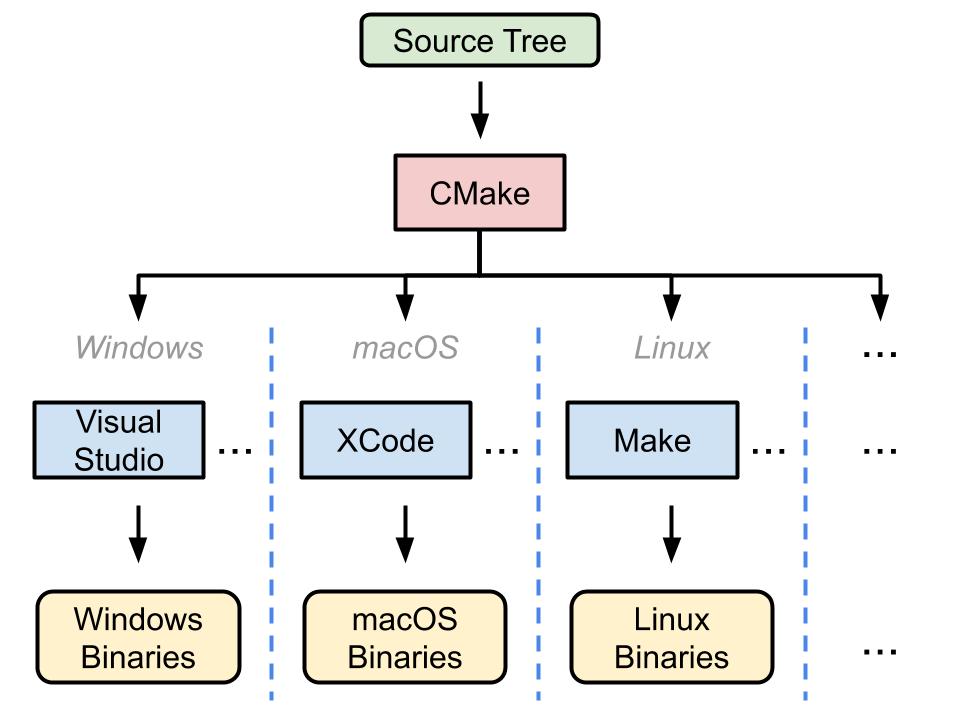
CMake for Visual Studio [TOC] Property Sheet example main.props, 在此文件 设置工程,方便分享 12345678910111213141516171819202122232425262728293031323334<?xml version="1.0" encoding="utf-8"?><Project DefaultTargets="Build" xml 2022-06-01 DevOps #Cpp #Visual Studio #CMake
求解方程数值近似解 Solve \(\sqrt{x}\) [1][2] Babylonian:巴比伦算法/牛顿法 [2][3] 123456// c++ codedouble ans=1, pre=0;while(abs(ans-pre)>1e-6){ pre=ans; ans=(ans+x/ans)/2;} 基于泰勒公式的级数逼近 [2] 在 线性化点 \(x_0=1\) 泰勒展开 \[ \sqr 2022-05-01 Maths #Online Compiler #Numerical Analysis #Taylor Series
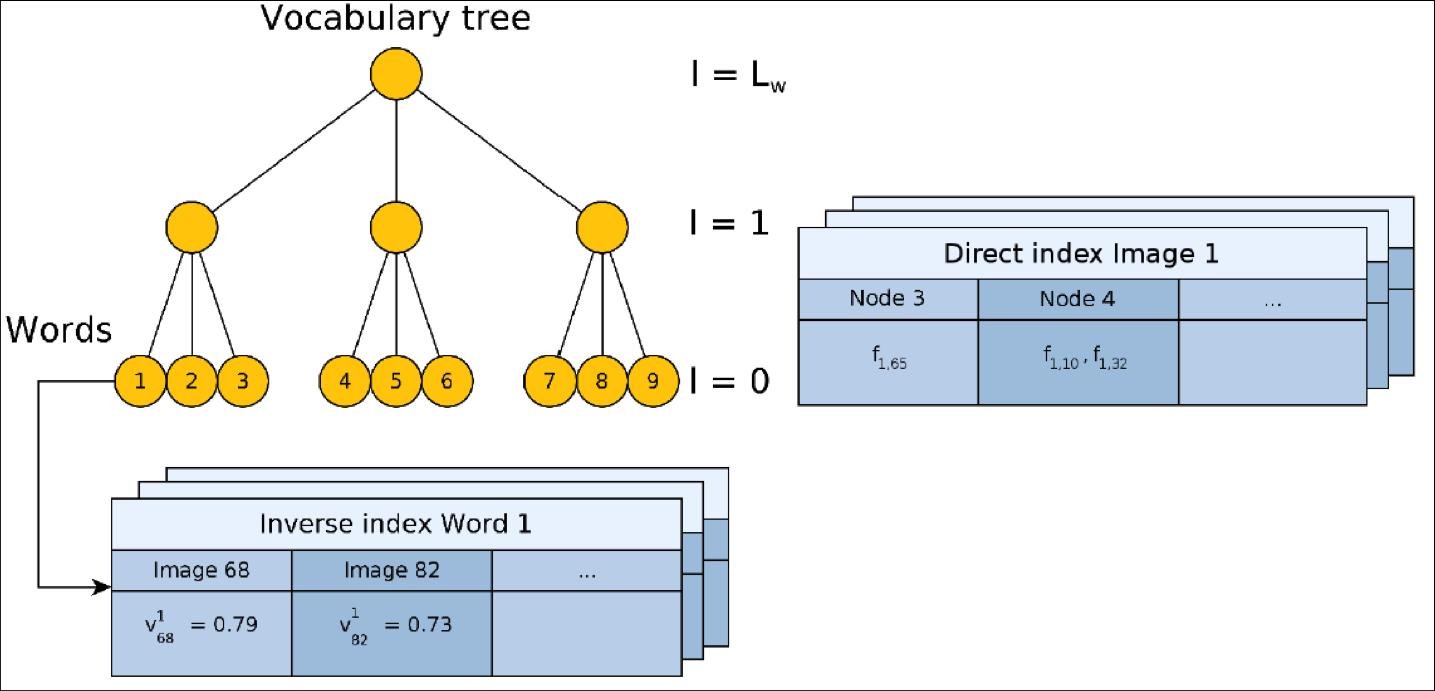
DBoW Note [TOC] Overview Bag of Words BoW(Bag of Words,词袋模型),是自然语言处理领域经常使用的一个概念。一篇文章可能有一万个词,其中可能只有500个不同的单词,每个词出现的次数各不相同。词袋就像一个个袋子,每个袋子里装着同样的词。这构成了一种文本的表示方式。这种表示方式不考虑文法以及词的顺序。 DBoW 在计算机视觉领域,图像通常以特征点及其特征描述来表达 2022-03-25 Computer Vision #Graph #Computer Vision #Pattern Recognition #BoW #Loop Closure
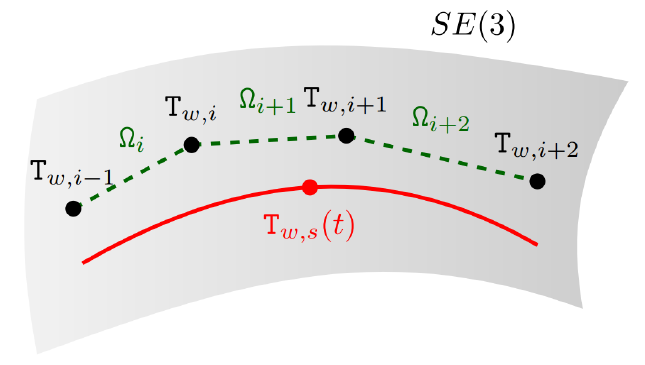
B-Spline for SLAM Overview to convert a set of trajectory points into a continuous-time uniform cubic cumulative b-spline BSpline.ipynb on Google Colaboratory Uniform Cubic B-Splines in \(\mathbb{SE(3)}\) Continuo 2022-03-21 Kinematics #Numerical Analysis #Interpolation #Spline #Kinematics
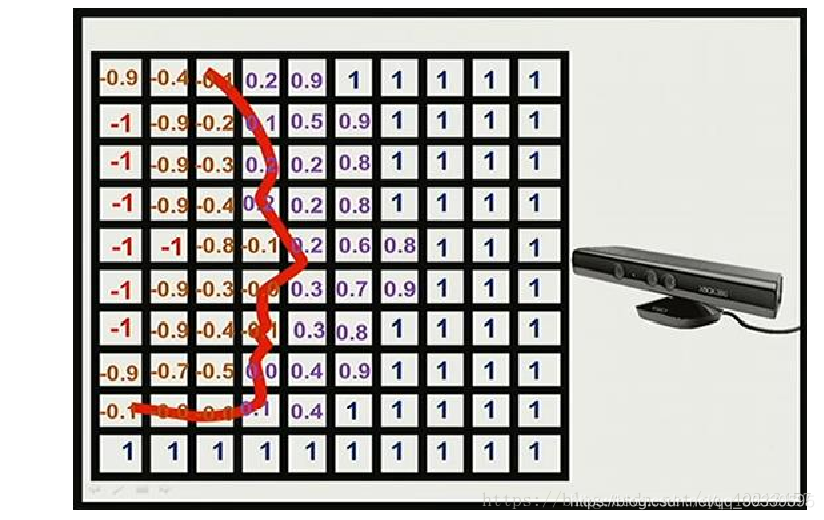
TSDF Overview [TOC] Overview SDF (Signed Distance Function) 描述的是点到面的距离,在面上为0,在面的一边为正,另一边为负。 TSDF (Truncated SDF) 只考虑面的邻域内的SDF值,邻域的最大值是max truncation的话,则实际距离会除以max truncation这个值,达到归一化的目的,所以TSDF的值在-1到+1之间。 算法逻辑 2022-03-13 Mapping #3D Reconstruction #Mapping #TSDF
EKF v.s. MSCKF v.s. MAP (VINS-Mono) [TOC] Overview \[ z = f(x) + n, \quad n \sim \mathcal{N}(0, \Sigma), \quad z \sim \mathcal{N}(f(x), \Sigma) \] \[ P(z \mid x) = \mathcal{N}(z; f(x), \Sigma) = \eta \exp \left(-\frac{1}{2}(z-f(x))^{T 2022-03-08 State Estimation #EKF #State Estimation #MSCKF #MAP
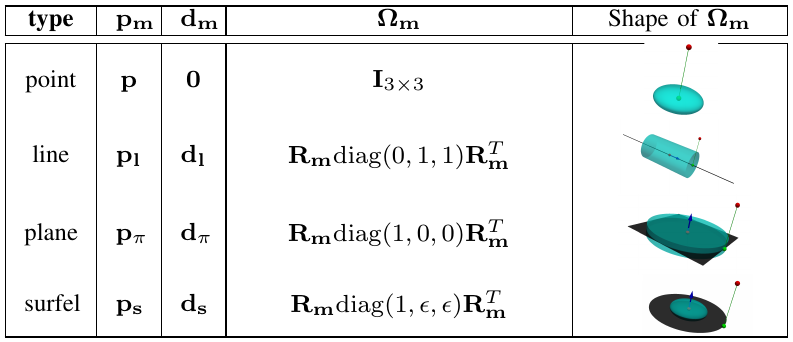
SLAM中的3D特征参数化表示 [TOC] Overview 一般表示形式 优化形式(避免过参数化) 特征的参数化表示,即以何种方式表示特征,在优化中决定了特征以何种参数进行的迭代更新,或者 在EKF中决定了以何种参数构建高斯模型。不论在优化还是EKF中,我们关心的都是特征在图像上的投影与特征参数之间的关系(Jacobian)。 过参数化(Overparameterization) 问题 特征参数化之后参数的个数大于实际表示 2022-03-06 MSF #Multi-Sensor Fusion #Parameterization #Inverse Depth
pod on macOS install brew 1/bin/zsh -c "$(curl -fsSL https://gitee.com/cunkai/HomebrewCN/raw/master/Homebrew.sh)" 安装 ruby,否则会报如下错误: ERROR: macbook gem install, You have to install development tools first 1brew 2022-03-01 DevOps #Xcode #macOS
图像频率域分析之频域谱(FDE) [TOC] Overview code: https://github.com/cggos/cvkit/blob/master/scripts/cv_py/fft_fde.py 主要用于: 图像模糊度计算 镜头对焦 频域熵(FDE) 计算图像的 频域谱,表示如下 \[ f(i, j) \] 将其 幅度谱 归一化 \[ f_{\text {norm }}(i, j)=\frac{1}{\sum_ 2022-01-31 Computer Vision #Computer Vision #DIP #Frequency Domain #Entropy
Data Association in ORB-SLAM2 [TOC] Overview Map Points & KeyFrames Each keyframe \(K_i\) stores ID 123static long unsigned int nNextId;long unsigned int mnId;const long unsigned int mnFrameId; camera pose camera intri 2022-01-08 SLAM #DSA #Graph #Visual SLAM #Data Association
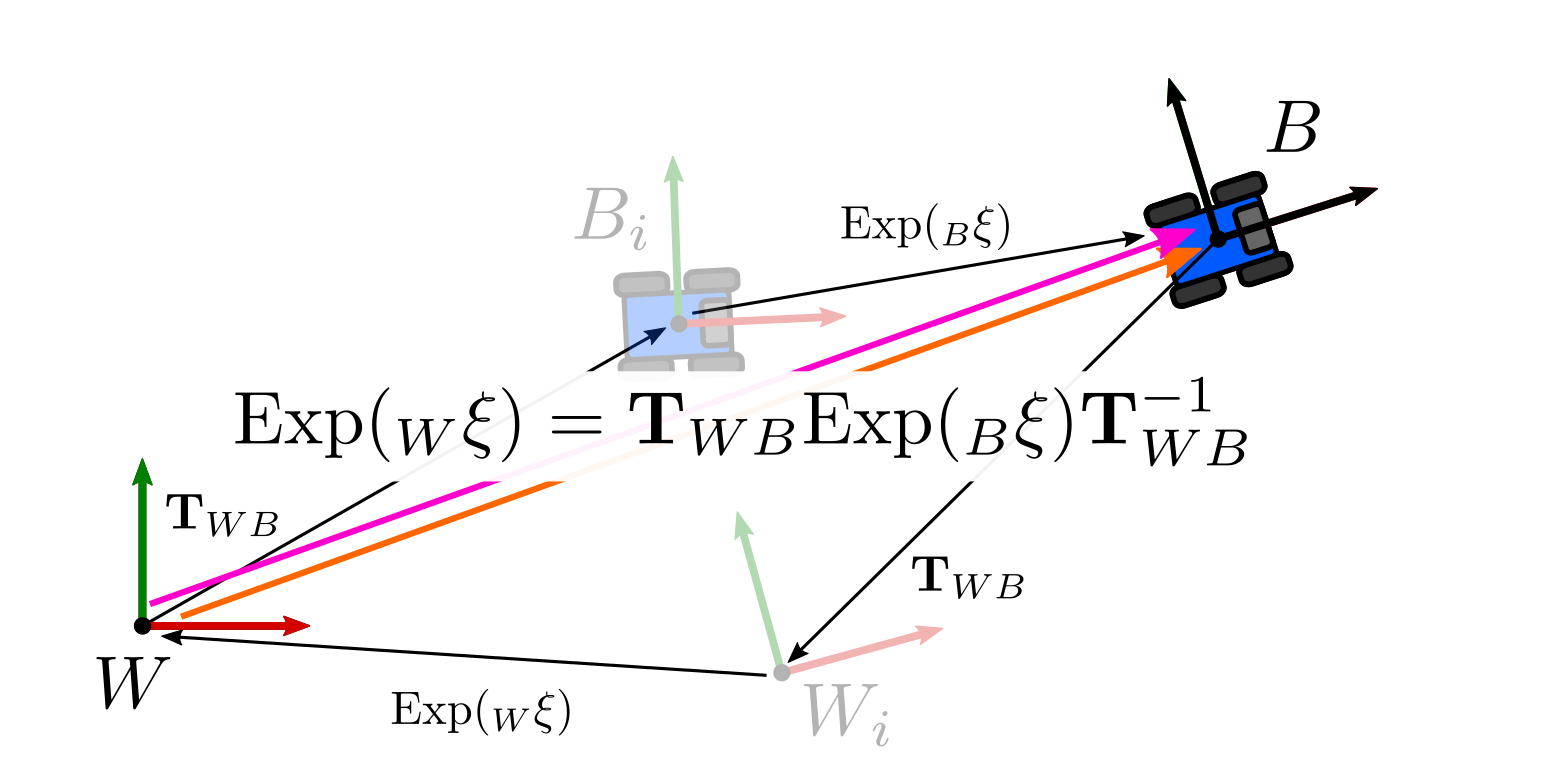
Lie Group and Lie Algebra: SO(3), SE(3) Overview [1] Matrix Exponential & Logarithm 已知 \(A \in \mathbb{R}^{M \times M}\), \[ \exp (\mathbf{A}) =\sum_{n=0}^{\infty} \frac{1}{n !} \mathbf{A}^{n} =\mathbf{1}+\mathbf{A}+\frac{1}{2 !} \ma 2022-01-08 Kinematics #Kinematics #Manifold #Lie Theory
镜像变换 2D 对于2D空间的某个条直线做镜像,假设该直线的 单位法向量 u(x,y),由 \(Q=I-2 u u^{T}\) 计算得到2D空间的镜像矩阵 \[ \left[ \begin{array}{cc} 1-2 n_{x}{ }^{2} & -2 n_{x} n_{y} \\ -2 n_{x} n_{y} & 1-2 n_{y}{ }^{2} \end 2022-01-08 Kinematics #Kinematics #Mirror Transform
Multi-Sensor Fusion: IMU and 6DoF Odometry Loosely-Coupled Fusion based on ESKF [TOC] code: cggos/imu_x_fusion 2021-12-29 MSF #Multi-Sensor Fusion #Kalman Filter #ESKF
Infrared(IR) Light of Depth Camera [TOC] Overview The infrared light recording of the devices we tested. The iPad LiDAR and the iPhone LiDAR emit point grids. The sensor of the Note10+ ToF flashes scattered light. The Pixel uses only i 2021-12-19 Computer Vision #Stereo Vision #Camera
基于ARKit的AR尺子Demo代码分析 Code: https://github.com/levantAJ/Measure UIViewController 123456789101112131415161718final class ViewController: UIViewController { override func touchesBegan(_ touches: Set<UITouch>, 2021-12-17 XR #ARKit
Multi-Sensor Fusion: Vehicle Localization based on Particle Filter [TOC] Overview code: cggos/carnd_p3_kidnapped_vehicle 粒子滤波(Particle Filter) 没有线性高斯分布的假设;相对于直方图滤波,粒子滤波(Particle Filter)不需要对状态空间进行区间划分。粒子滤波算法采用很多粒子对置信度进行近似,每个粒子都是对t时刻机器人实际状态的一个猜测。 越接近t时刻的Ground Truth状 2021-12-13 MSF #Multi-Sensor Fusion #Particle Filter
Multi-Sensor Fusion: LiDAR and Radar fusion based on UKF [TOC] Overview code: cggos/lidar_radar_fusion_ekf_ukf EKF v.s. UKF v.s. PF EKF: 通过 泰勒分解将模型线性化 求出预测模型的概率均值和方差 线性、高斯 对于非线性问题, EKF除了计算量大,还有线性误差的影响 UKF: 通过 不敏变换 来求出预测模型的均值和方差 非线性、高斯 UKF生成了一些点,来近似非线性 2021-12-12 MSF #Multi-Sensor Fusion #Kalman Filter #UKF
(Paper Reading) A Novel Feedback Mechanism-Based Stereo Visual-Inertial SLAM Overview the filtering-based frontend VIO the optimization-based backend with loop closure the state feedback Inspired by the idea of [38], we feed the optimized state produced by the backend ba 2021-12-12 SLAM #Visual SLAM #Loop Closure #VIO #MSCKF #Paper Reading
Zero Velocity Update (ZUPT) in OpenVINS [TOC] Overview The key idea of the zero velocity update (ZUPT) is to allow for the system to reduce its uncertainty leveraging motion knowledge (i.e. leverage the fact that the system is stationary). 2021-12-06 SLAM #Visual SLAM #VIO #State Estimation #MSCKF #ZUPT
Photometric Calibration [TOC] Overview https://github.com/tum-vision/mono_dataset_code https://blog.csdn.net/KYJL888/article/details/104893357 https://github.com/tum-vision/online_photometric_calibration Install 安装aruco ma 2021-11-28 Computer Vision #Computer Vision #Sensor Calibration #Camera Calibration