Data Association in ORB-SLAM2
Last updated on March 2, 2026 pm
[TOC]
Overview
Map Points & KeyFrames
- Each keyframe \(K_i\) stores
ID
1
2
3static long unsigned int nNextId;
long unsigned int mnId;
const long unsigned int mnFrameId;camera pose
camera intrinsics
KeyPoints related
1
2
3
4
5
6
7
8
9
10
11
12
13// Number of KeyPoints
const int N;
// KeyPoints, stereo coordinate and descriptors (all associated by an index)
const std::vector<cv::KeyPoint> mvKeys;
const std::vector<cv::KeyPoint> mvKeysUn;
const std::vector<float> mvuRight; // negative value for monocular points
const std::vector<float> mvDepth; // negative value for monocular points
const cv::Mat mDescriptors;
// BoW
DBoW2::BowVector mBowVec;
DBoW2::FeatureVector mFeatVec;MapPoints associated to keypoints
1
2
3
4
5
6std::vector<MapPoint*> mvpMapPoints;
void KeyFrame::AddMapPoint(MapPoint *pMP, const size_t &idx) {
unique_lock<mutex> lock(mMutexFeatures);
mvpMapPoints[idx] = pMP;
}
- Each map point \(P_i\) stores
ID
1
2
3
4
5long unsigned int mnId;
static long unsigned int nNextId;
long int mnFirstKFid;
long int mnFirstFrame;Reference KeyFrame (TODO: Anchor Frame?)
1
KeyFrame* mpRefKF;3D position
cv::Mat mWorldPos;Mean viewing direction
cv::Mat mNormalVector;Best descriptor to fast matching
cv::Mat mDescriptor;The maximum and minimum distances
1
2
3// Scale invariance distances
float mfMinDistance;
float mfMaxDistance;Keyframes observing the point and associated index in keyframe
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15std::map<KeyFrame*,size_t> mObservations;
int nObs;
void MapPoint::AddObservation(KeyFrame* pKF, size_t idx)
{
unique_lock<mutex> lock(mMutexFeatures);
if(mObservations.count(pKF))
return;
mObservations[pKF]=idx;
if(pKF->mvuRight[idx]>=0)
nObs+=2;
else
nObs++;
}Tracking counters
1
2int mnVisible;
int mnFound;
exigent culling mechanism
MapPoints
1
void LocalMapping::MapPointCulling();KeyFrame
1
void LocalMapping::KeyFrameCulling();
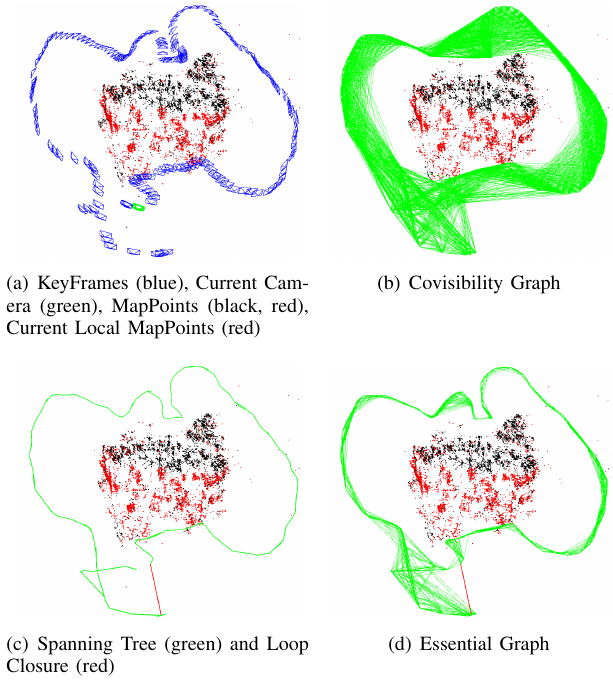
Covisible Graph (KeyFrame Connections)
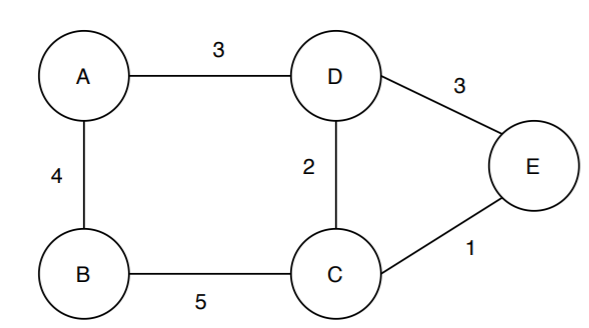
Covisibility information between keyframes is very useful in several tasks of our system, and is represented as an undirected weighted graph.
- Node (KeyFrame)
- Edge (Weight): 关键帧之间共视的 路标点数,至少15
1 | |
Spanning Tree

The system builds incrementally a spanning tree from the initial keyframe, which provides a connected subgraph of the covisibility graph with minimal number of edges. When a new keyframe is inserted, it is included in the tree linked to the keyframe which shares most point observations, and when a keyframe is erased by the culling policy, the system updates the links affected by that keyframe.
- Parent Node:
KeyFrame* mpParent;, the pair with highest covisibility weight - Child Nodes:
std::set<KeyFrame*> mspChildrens;
1 | |
- TrackLocalMap 里 UpdateLocalKeyFrames更新局部地图中的关键帧
- 闭环矫正时 优化 Essential Graph
Loop Edges
std::set<KeyFrame*> mspLoopEdges;
1 | |
Essential Graph
The Essential Graph contains the spanning tree, the subset of edges from the covisibility graph with high covisibility (\(\theta_{min} = 100\)), and the loop closure edges, resulting in a strong network of cameras.
- Node (KeyFrame)
- Edge
- Spanning tree edges
- Covisibility graph edges (weight > 100):
pKF->GetCovisiblesByWeight(100) - Loop edges