Last updated on March 2, 2026 pm
[TOC]
Overview
粒子滤波(Particle Filter) 没有线性高斯分布的假设 ;相对于直方图滤波,粒子滤波(Particle Filter)不需要对状态空间进行区间划分。粒子滤波算法采用很多粒子对置信度进行近似,每个粒子都是对t时刻机器人实际状态的一个猜测。
越接近t时刻的Ground Truth状态描述的粒子,权重越高。
粒子更新的过程类似于达尔文的自然选择(Natural Selection)机制,与当前Sensor测量状态越匹配的粒子,有更大的机会生存下来,与Sensor测量结果不符的粒子会被淘汰掉,最终粒子都会集中在正确的状态附近。
粒子滤波(Particle Filter)的主要步骤如下:
Initialisation Step:在初始化步骤中,根据GPS坐标输入估算位置,估算位置是存在噪声的,但是可以提供一个范围约束。
Prediction Step:在Prediction过程中,对所有粒子(Particles)增加车辆的控制输入(速度、角速度等),预测所有粒子的下一步位置。
Update Step:在Update过程中,根据地图中的Landmark位置和对应的测量距离来更新所有粒子(Particles)的权重。
Resample Step:根据粒子(Particles)的权重,对所有粒子(Particles)进行重采样,权重越高的粒子有更大的概率生存下来,权重越小的例子生存下来的概率就越低,从而达到优胜劣汰的目的。
\[
X = \begin{bmatrix} x \\ y \\ \theta \end{bmatrix}
\]
Initialization
初始化阶段,车辆接收到来自GPS的带噪声的测量值,并将其用于初始化车辆的位置。GPS的测量值包括车辆的位置 \(P(x,y)\) 和 朝向 \(\theta\) ,并且假设测量结果的噪声服从正态分布。
我们创建100个粒子,并用GPS的测量值初始化这些粒子的位置和朝向。粒子的个数是一个可调参数,可根据实际效果和实际需求调整。初始化时,所有粒子的权重相同。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 normal_distribution<double > dist_x (x, std_x) ;normal_distribution<double > dist_y (y, std_y) ;normal_distribution<double > dist_theta (theta, std_theta) ;for (int i = 0 ; i < num_particles; i++) {dist_x (gen);dist_y (gen);dist_theta (gen);1.0 ;push_back (p);
Motion Prediction
初始化完成之后,对所有粒子执行车辆运动模型,预测每个粒子下一步出现的位置。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 normal_distribution<double > dist_x (0 , std_pos[0 ]) ;normal_distribution<double > dist_y (0 , std_pos[1 ]) ;normal_distribution<double > dist_theta (0 , std_pos[2 ]) ;for (int i = 0 ; i < num_particles; i++) {if (fabs (yaw_rate) < 0.00001 ) {delta_t * cos (particles[i].theta);delta_t * sin (particles[i].theta);else {sin (particles[i].theta + yaw_rate * delta_t ) - sin (particles[i].theta));cos (particles[i].theta) - cos (particles[i].theta + yaw_rate * delta_t ));delta_t ;dist_x (gen);dist_y (gen);dist_theta (gen);
Measurement Update
在更新过程中,将激光雷达(Lidar)/Radar对于Landmark的测量结果集成到粒子滤波(Particle Filter)中,用于更新所有粒子的权重。
假设粒子(Particle)的坐标为 \((x_p, y_p)\) ,Landmark的观测在车辆坐标系中的坐标为 \((x_c, y_c)\) ,Landmark的观测转换到地图(Map)坐标系的坐标为 \((x_m, y_m)\) ,车辆的Heading为 \(\theta\) ,则从车辆坐标系到地图坐标系的变换如下:
\[
\left[\begin{array}{c}\mathrm{x}_{m} \\\mathrm{y}_{m} \\1\end{array}\right]=
\left[\begin{array}{ccc}\cos \theta & -\sin \theta & \mathrm{x}_{p} \\\sin \theta & \cos \theta & \mathrm{y}_{p} \\0 & 0 & 1\end{array}\right] \cdot
\left[\begin{array}{c}\mathrm{x}_{c} \\\mathrm{y}_{c} \\1\end{array}\right]
\]
Data Association
Associations主要将LandMark的测量结果匹配到Map中的LandMark。
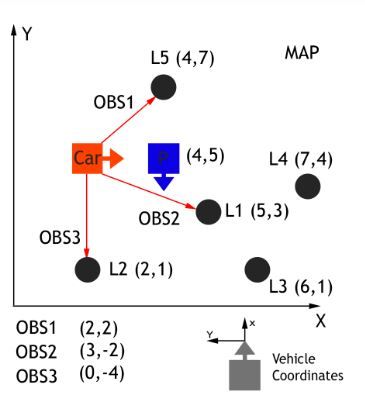
如下图所示,L1,L2,…,L5是地图(Map)中的Landmark;OBS1、OBS2、OBS3是车辆的Observation。红色方块是车辆的GroundTruth位置,蓝色方块是车辆的预测位置。
我们可以看到地图有5个LandMark,它们分别被标识为L1、L2、L3、L4、L5,并且每个LandMark都有已知的地图位置。我们需要将每个转换后的观测值TOBS1、TOBS2、TOBS3与这5个标识符中的一个相关联。其中一个直观的做法就是每个转换后的观测LandMark坐标与最近的Map LandMark相关联。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 void ParticleFilter::dataAssociation ( std::vector<LandmarkObs> predicted, std::vector<LandmarkObs>& observations) for (unsigned int i = 0 ; i < observations.size (); i++) {unsigned int nObs = observations.size ();unsigned int nPred = predicted.size ();for (unsigned int i = 0 ; i < nObs; i++) { double minDist = numeric_limits<double >::max ();int mapId = -1 ;for (unsigned j = 0 ; j < nPred; j++) { double xDist = observations[i].x - predicted[j].x;double yDist = observations[i].y - predicted[j].y;double distance = xDist * xDist + yDist * yDist;if (distance < minDist) {
Update Weights
完成观测LandMark坐标转换之后和地图匹配之后,就可以更新粒子的权重了。由于粒子对所有LandMark的观测都是独立的,所以粒子的总权重是所有观测LandMark的多元高斯概率密度的乘积。
\[
P(x, y) =
\frac{1}{2 \pi \sigma_{x} \sigma_{y}}
e^{-\left(\frac{\left(x-\mu_{x}\right)^{2}}{2 \sigma_{x}^{2}}+\frac{\left(y-\mu_{y}\right)^{2}}{2 \sigma_{y}^{2}}\right)}
\]
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 particles[i].weight = 1.0 ;for (unsigned int j = 0 ; j < trans_os.size (); j++) {double o_x, o_y, pr_x, pr_y;int asso_prediction = trans_os[j].id;for (unsigned int k = 0 ; k < predictions.size (); k++) {if (predictions[k].id == asso_prediction) {double s_x = std_landmark[0 ];double s_y = std_landmark[1 ];double obs_w = (1 / (2 * M_PI * s_x * s_y)) *exp (-(pow (pr_x - o_x, 2 ) / (2 * pow (s_x, 2 )) + pow (pr_y - o_y, 2 ) / (2 * pow (s_y, 2 )))));
Resample
重采样(Resample)是从旧粒子(Old Particles)中随机抽取新粒子(New Particles)并根据其权重进行替换的过程。重采样后,具有更高权重的粒子保留的概率越大,概率越小的粒子消亡的概率越大。
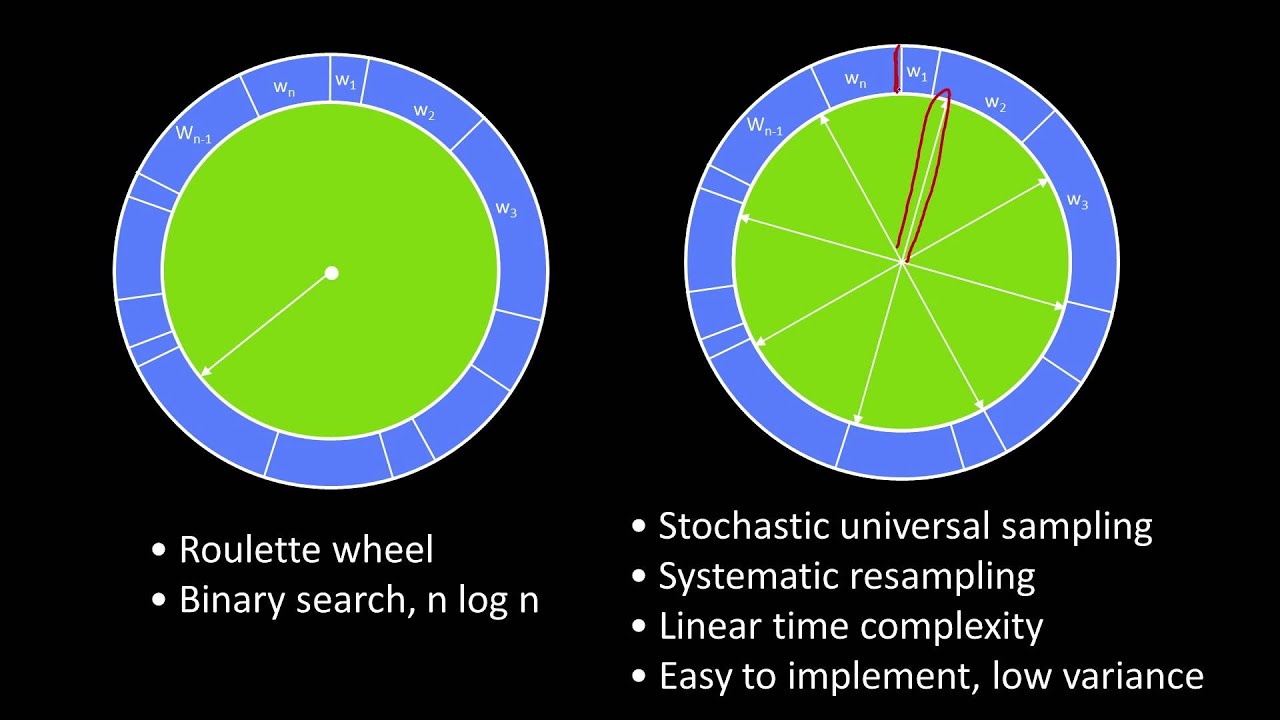
常用的Resample技术是Resampling Wheel。Resampling Wheel的算法思想如下:如下图所示的圆环,圆环的弧长正比与它的权重(即权重越大,弧长越长)。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 void ParticleFilter::resample () double > weights;double maxWeight = numeric_limits<double >::min ();for (int i = 0 ; i < num_particles; i++) {push_back (particles[i].weight);if (particles[i].weight > maxWeight) {uniform_real_distribution<double > distDouble (0.0 , maxWeight) ;uniform_int_distribution<int > distInt (0 , num_particles - 1 ) ;int index = distInt (gen);double beta = 0.0 ;for (int i = 0 ; i < num_particles; i++) {distDouble (gen) * 2.0 ;while (beta > weights[index]) {1 ) % num_particles;push_back (particles[index]);
Ref