通过 Arduino 从 MPU6050 获取 IMU 数据进行姿态解算,并利用 Processing 进行三维姿态显示
Last updated on November 26, 2023 pm
Overview
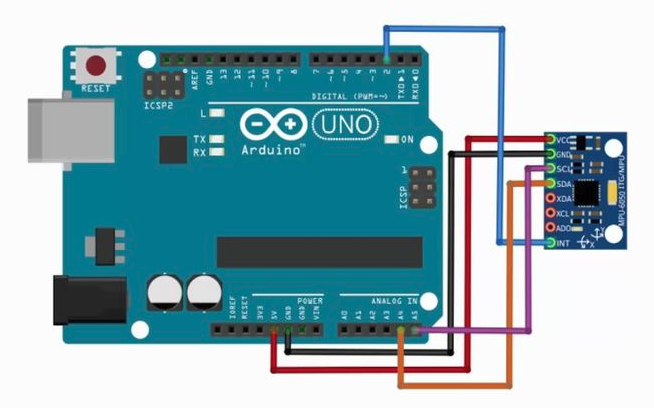
Arduino UNO & MPU6050 GY521
- Arduino教程:MPU6050的数据获取、分析与处理
- How to Interface Arduino and the MPU 6050 Sensor
- Arduino and MPU6050 Accelerometer and Gyroscope Tutorial
Hardware components
Arduino Apps
- Download jrowberg/i2cdevlib/Arduino, copy I2Cdev and MPU6050 to Arduino libraries
- Open Arduino IDE, File->Examples->MPU6050->MPU6050_MPU6
#define OUTPUT_READABLE_YAWPITCHROLL->//#define OUTPUT_READABLE_YAWPITCHROLL//#define OUTPUT_TEAPOT->#define OUTPUT_TEAPOT- compile and upload
Processing Apps for 3D Simulation
- install Processing IDE
- install ToxicLib into the Processing's libraries folder (modes -> java -> libraries), unzip toxiclibs-complete-0020.zip in ToxicLibs and place aLL the contents there
- running the teapot demo from the MPU6050_DMP6 example from Jeff Rowberg's MPU6050 libary

通过 Arduino 从 MPU6050 获取 IMU 数据进行姿态解算,并利用 Processing 进行三维姿态显示
https://cgabc.xyz/posts/8bc28273/