3D欧式变换之AB两坐标系间变换
Last updated on November 26, 2023 pm
[TOC]
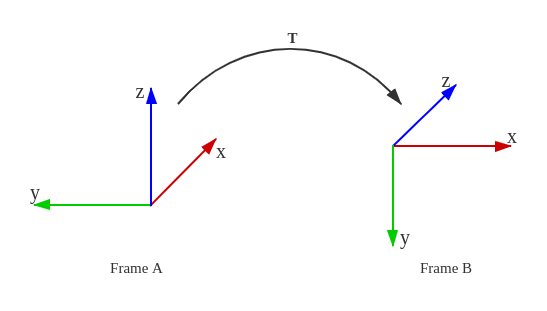
Frame A to B
Frame B 的基向量 到 Frame A 的基向量
\[ B = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \Longrightarrow A = \begin{bmatrix} 0 & 0 & 1 \\ -1 & 0 & 0 \\ 0 & -1 & 0 \end{bmatrix} \]
则 Frame B 到 Frame A 的 主动旋转 为
\[ R_{AB}^a = A \]
则 Frame A 到 Frame B 的 被动旋转 为
\[ R_{BA}^p = R_{AB}^a = A \]
通过在线工具 (https://www.andre-gaschler.com/rotationconverter/) 将 \(A\) 转换为 Euler angles (radians, ZYX or YPR)
\[ \left[-\frac{\pi}{2} \quad 0 \quad -\frac{\pi}{2} \right] \]
Frame Base to Camera
1 | |
static_transform_publisher: transform from
parent frame to child frame
3D欧式变换之AB两坐标系间变换
https://cgabc.xyz/posts/f53543fe/