插值、拟合、积分
Last updated on March 2, 2026 pm
[TOC]
Overview
插值:求过已知有限个数据点的近似函数。
拟合:已知有限个数据点,求近似函数,不要求过已知数据点,只要求在某种意义下它在这些点上的总偏差最小。
插值和拟合都是要根据一组数据构造一个函数作为近似,由于近似的要求不同,二者的数学方法上是完全不同的。而面对一个实际问题,究竟应该用插值还是拟合,有时容易确定,有时则并不明显。
插值
Comparison of 1D and 2D Interpolations
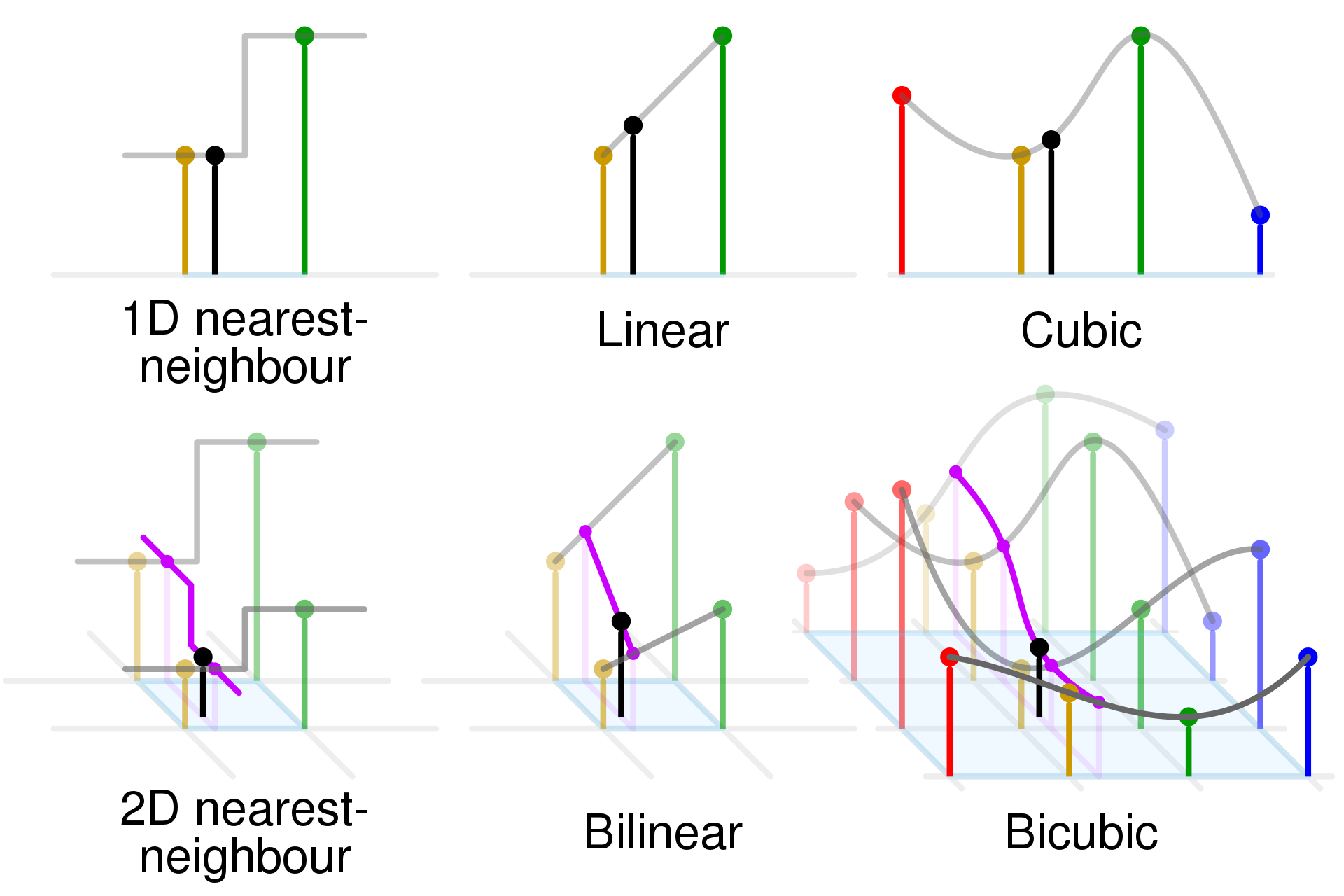
最近邻插值
1D Nearest Interpolation
2D Nearest Interpolation
\[ \mathbf{I}_\mathrm{dst}(i, j) = \mathbf{I}_\mathrm{src}(u^{\prime}, v^{\prime}) = \mathbf{I}_\mathrm{src}(u, v) \]
with
\[ (i, j) \Rightarrow (u^{\prime}, v^{\prime}) \Rightarrow \begin{cases} u = \text{round}(u^{\prime}) \\ v = \text{round}(v^{\prime}) \end{cases} \]
1 | |
线性插值
Linear Interpolation (Lerp)
Bilinear Interpolation
\[ \mathbf{I}_\mathrm{dst}(i, j) = \mathbf{I}_\mathrm{src}(u^{\prime}, v^{\prime}) = \mathbf{I}_\mathrm{src}(u+\alpha, v+\beta) \]
with
\[ (i, j) \Rightarrow (u^{\prime}, v^{\prime}) \Rightarrow \begin{cases} u = \text{floor}(u^{\prime}) = \lfloor u^{\prime} \rfloor \\ v = \text{floor}(v^{\prime}) = \lfloor v^{\prime} \rfloor \end{cases} \Rightarrow \begin{cases} \alpha = u^{\prime} - u \\ \beta = v^{\prime} - v \end{cases} \]
令
\[ \begin{aligned} f_{00} &= f(u, v) \\ f_{01} &= f(u, v + 1) \\ f_{10} &= f(u + 1, v) \\ f_{11} &= f(u + 1, v + 1) \end{aligned} \]
(1) V方向线性插值
\[ \begin{cases} f(u, & v+\beta) = (f_{01} - f_{00}) \beta + f_{00} \\ f(u+1, & v+\beta) = (f_{11} - f_{10}) \beta + f_{10} \end{cases} \]
(2) U方向线性插值
\[ f(u+\alpha, v+\beta) = [f(u+1, v+\beta) - f(u, v+\beta)]\alpha + f(u, v+\beta) \]
(3)最终
\[ f(u+\alpha, v+\beta) = [(1-\alpha)(1-\beta)]f_{00} + \beta (1-\alpha) f_{01} + \alpha (1-\beta) f_{10} + \alpha \beta f_{11} \]
1 | |
Spherical Linear Interpolation (Slerp)
- Ref: ESKF 2.7
- https://splines.readthedocs.io/en/latest/rotation/slerp.html
\[ \mathbf{q}(t)=\mathbf{q}_{0} \frac{\sin ((1-t) \Delta \theta)}{\sin (\Delta \theta)}+\mathbf{q}_{1} \frac{\sin (t \Delta \theta)}{\sin (\Delta \theta)} \]
1 | |
Slerp v.s. Nlerp
- Nlerp: Normalized Linear Interpolation
样条插值 (Spline)
Bezier Curve
Cubic Spline Interpolation
B-Spline
积分
Runge-Kutta numerical integration methods
The Euler method
\[ \mathbf{x}_{n+1}=\mathbf{x}_{n}+\Delta t \cdot k_1 \]
where
\[ k_1 = f\left(t_{n}, \mathbf{x}_{n}\right) \]
The midpoint method
\[ \mathbf{x}_{n+1} = \mathbf{x}_{n} + \Delta t \cdot k_2 \]
where
\[ k_2 = f\left(t_{n}+\frac{1}{2} \Delta t, \mathbf{x}_{n} + \frac{\Delta t}{2} \cdot k_1\right) \]
The RK4 method
\[ \mathbf{x}_{n+1}=\mathbf{x}_{n}+\frac{\Delta t}{6}\left(k_{1}+2 k_{2}+2 k_{3}+k_{4}\right) \]
where
\[ \begin{aligned} k_{1} &=f\left(t_{n}, \mathbf{x}_{n}\right) \\ k_{2} &=f\left(t_{n}+\frac{1}{2} \Delta t, \mathbf{x}_{n}+\frac{\Delta t}{2} k_{1}\right) \\ k_{3} &=f\left(t_{n}+\frac{1}{2} \Delta t, \mathbf{x}_{n}+\frac{\Delta t}{2} k_{2}\right) \\ k_{4} &=f\left(t_{n}+\Delta t, \mathbf{x}_{n}+\Delta t \cdot k_{3}\right) \end{aligned} \]
General Runge-Kutta method
\[ \mathbf{x}_{n+1}=\mathbf{x}_{n}+\Delta t \sum_{i=1}^{s} b_{i} k_{i} \]
where
\[ k_{i}=f\left(t_{n}+\Delta t \cdot c_{i}, \mathbf{x}_{n}+\Delta t \sum_{j=1}^{s} a_{i j} k_{j}\right) \]