Last updated on March 2, 2026 pm
[TOC]
Overview
三维空间中的变换主要分为如下几种:
其性质如下图所示:
本文主要介绍欧式变换。
欧式变换
\[
\mathbf{T} =
\begin{bmatrix} \mathbf{R} & \mathbf{t} \\ \mathbf{0}^T & 1 \end{bmatrix}
\in \mathbb{R}^{4 \times 4}
\]
\[
\mathbf{T}^{-1} =
\begin{bmatrix}
\mathbf{R}^T & -\mathbf{R}^T \cdot \mathbf{t} \\ \mathbf{0}^T & 1
\end{bmatrix}
\in \mathbb{R}^{4 \times 4}
\]
Translate by \(-C\) (align origins), Rotate to align axes:
\[
\begin{aligned}
P_c &= \mathbf{T} \cdot P_w \\
&= \mathbf{R} \cdot (P_w - C) \\
&= \mathbf{R} \cdot P_w - \mathbf{R} \cdot C \\
&= \mathbf{R} \cdot P_w + \mathbf{t}
\end{aligned}
\]
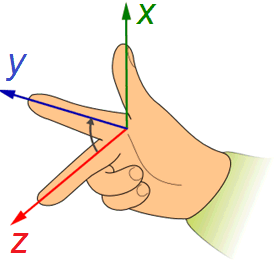
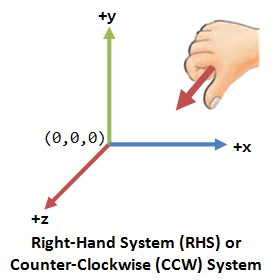
坐标系的手性主要分为 右手系 和 左手系 ,主要通过以下两种方法区分(右手系):
3 finger method
Curling method
另外,不同的几何编程库所基于的坐标系的手性会有所不同
Eigen: 右手系
OpenGL: 右手系
Unity3D: 左手系
ROS tf: 右手系
注意事项
区分 点的变换 和 坐标系本身的变换
\[
P_a = \mathbf{T}_{AB} \cdot P_b
\]
指的是 将某点在B坐标系中的坐标表示变换为其在A坐标系中的坐标表示,实质是同一点在不同坐标系下的不同坐标表示,即 点的变换 ;若将A和B坐标系假设为刚体,则B坐标系变换到A坐标系(坐标系本身的变换 )的变换矩阵为 \(\mathbf{T}_{AB}^{-1}\) 。
在分析多个坐标系的姿态变换时,要注意根据点的变换或者坐标系的变换确定矩阵左乘还是右乘:点的变换 :矩阵相乘 从右到左,即 矩阵左乘 * 坐标系的变换 :矩阵相乘 从左到右,即 矩阵右乘
区分 绕定轴旋转 和 绕动轴旋转
注意 右手系 和 左手系
编程库实践
下面通过示例代码对自己使用过的库进行介绍。
Eigen
Eigen is a C++ template library for linear algebra: matrices, vectors, numerical solvers, and related algorithms.
1 2 3 4 5 6 7 8 9 10 11 Eigen::Matrix3d m3_r_z = Eigen::AngleAxisd (M_PI/2 , Eigen::Vector3d (0 ,0 ,1 )).toRotationMatrix ();Eigen::Quaterniond q_r_z (m3_r_z) ;Eigen::Vector3f v3_translation (x, y, z) ;Eigen::Quaternion<double > q (w, qx, qy, qz) ;matrix ();Identity ();block <3 ,1 >(0 ,3 ) = v3_translation;block <3 ,3 >(0 ,0 ) = m3_rotation;
TooN
Tom’s Object-oriented numerics library, is a set of C++ header files which provide basic linear algebra facilities
Array2SE3 :
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 #include <TooN/TooN.h> #include <TooN/se3.h> void Tools::Array2SE3 (const float *array, SE3<> &se3) 3 ,3 > m3Rotation;for (int i=0 ;i<3 ;i++)for (int j=0 ;j<3 ;j++)4 +j];3 > v3Translation;0 ] = array[ 3 ];1 ] = array[ 7 ];2 ] = array[11 ];3. get_rotation () = so3;3. get_translation () = v3Translation;
Sophus
C++ implementation of Lie Groups using Eigen commonly used for 2d and 3d geometric problems (i.e. for Computer Vision or Robotics applications)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 #include <iostream> #include <sophus/se3.hpp> AngleAxisd (M_PI/2 , Eigen::Vector3d (0 ,0 ,1 )).toRotationMatrix ();Eigen::Quaterniond q (R) ;Eigen::Vector3d t (1 ,0 ,0 ) ;Sophus::SE3 SE3_Rt (R, t) ;Sophus::SE3 SE3_qt (q, t) ;typedef Eigen::Matrix<double ,6 ,1 > Vector6d;log ();"se3 hat = " << std::endlhat (se3) << std::endl;"se3 hat vee = " << std::endlvee ( Sophus::SE3::hat (se3) ).transpose () << std::endl;3. setZero ();update_se3 (0 ,0 ) = 1e-4 d;exp (update_se3) * SE3_Rt;"SE3 updated = " << std::endlmatrix () << std::endl;
ROS tf & tf2
tf is a package that lets the user keep track of multiple coordinate frames over time. tf maintains the relationship between coordinate frames in a tree structure buffered in time, and lets the user transform points, vectors, etc between any two coordinate frames at any desired point in time.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 #include <Eigen/Geometry> #include <tf_conversions/tf_eigen.h> #include <tf2/LinearMath/Quaternion.h> #include <tf2/LinearMath/Matrix3x3.h> #include <geometry_msgs/TransformStamped.h> setOrigin ( tf::Vector3 (x, y, z) );setRPY (r, p, y);setRotation (q);Matrix3x3 (tf2::Quaternion (q_msg.x, q_msg.y, q_msg.z, quaternion_imu_.w))getRPY (v3_r[0 ], v3_r[1 ], v3_r[2 ]);2. setRPY (v3_r[0 ], v3_r[1 ], v3_r[2 ]);2. normalize ();x ();y ();z ();w ();