3D欧式变换之旋转ABC
Last updated on March 2, 2026 pm
Overview
旋转表示
旋转矩阵 (Rotation Matrix)
\[ \mathbf{R} = \begin{bmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{bmatrix} \in \mathbb{R}^{3 \times 3}, \quad s.t. \quad \mathbf{RR}^T = \mathbf{I}, \det(\mathbf{R}) = 1 \]
旋转矩阵 归一化
我们通过某些计算得出的“旋转矩阵”可能不符合旋转矩阵的条件,需要对其 归一化
1 | |
旋转向量/轴角 (Rotation Vector)
\[ \boldsymbol{\phi} = \mathbf{u} \theta = \log(\mathbf{R})^{\vee} \in \mathbb{R}^3 \]
旋转轴:矩阵 \(\mathbf{R}\) 特征值1对应的特征向量(单位矢量) \[ \mathbf{u} = \frac{\boldsymbol{\phi}}{||\boldsymbol{\phi}||} \in \mathbb{R}^3 \]
旋转角 \[ \theta = ||\boldsymbol{\phi}|| = \arccos \left(\frac{tr(\mathbf{R})-1}{2} \right) \in \mathbb{R} \]
旋转向量与旋转矩阵的转换,罗德里格斯公式 [2]
\[ \mathbf{R} = \cos \theta \mathbf{I} + (1-\cos \theta) \mathbf{uu}^T + \sin \theta \mathbf{u}^{\wedge} \]
Rotation/Unit Quarternion [1]
Lie Group & Lie Algebra \(SO(3)\) [1]
Euler Angle
旋转矩阵可以可以分解为绕各自轴对应旋转矩阵的乘积:
\[ \mathbf{R} = \mathbf{R}_1 \mathbf{R}_2 \mathbf{R}_3 \]
根据绕轴的不同,欧拉角共分为两大类,共12种,如下图(基于 右手系)所示:
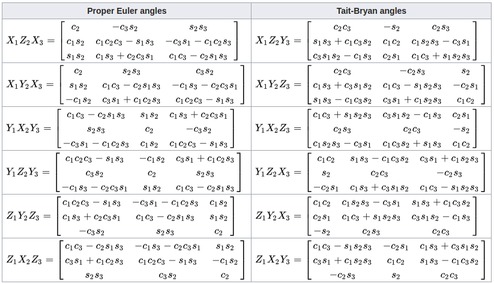
以上不同旋转轴合成的旋转矩阵,每一种都可以看成 同一旋转矩阵的两种不同物理变换:
- 绕 固定轴 旋转
- 绕 动轴 旋转
以 \(Z_1Y_2X_3\) 进行为例,旋转矩阵表示为 \(\mathbf{R} = \mathbf{R}_z \mathbf{R}_y \mathbf{R}_x\),说明:
绕 固定轴 旋转:以初始坐标系作为固定坐标系,分别先后绕固定坐标系的X、Y、Z轴 旋转;
绕 动轴 旋转:先绕 初始Z轴 旋转,再绕 变换后的Y轴 旋转,最后绕 变换后的X轴 旋转
即 绕 固定坐标轴的XYZ 和 绕运动坐标轴的ZYX 的旋转矩阵是一样的。
我们经常用的欧拉角一般就是 \(Z_1Y_2X_3\) 轴序的 yaw-pitch-roll,如下图所示:
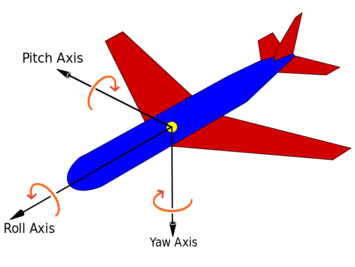
对应的旋转矩阵为
\[ \mathbf{R} = \mathbf{R}_z \mathbf{R}_y \mathbf{R}_x = \mathbf{R}(\theta_{yaw}) \mathbf{R}(\theta_{pitch}) \mathbf{R}(\theta_{roll}) \]
其逆矩阵为:
\[ \begin{aligned} \mathbf{R}^{-1} &= (\mathbf{R}_z \mathbf{R}_y \mathbf{R}_x)^{-1} \\ &= \mathbf{R}_x^{-1} \mathbf{R}_y^{-1} \mathbf{R}_z^{-1} \\ &= \mathbf{R}(-\theta_{roll}) \mathbf{R}(-\theta_{pitch}) \mathbf{R}(-\theta_{yaw}) \end{aligned} \]
上面 \(\mathbf{R}_x \mathbf{R}_y \mathbf{R}_z\) 以 Cosine Matrix 的形式表示为(右手系):
\[ \mathbf{R}_x(\theta) = \begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos(\theta) & -\sin(\theta) \\ 0 & \sin(\theta) & \cos(\theta) \end{bmatrix} \]
\[ \mathbf{R}_y(\theta) = \begin{bmatrix} \cos(\theta) & 0 & \sin(\theta) \\ 0 & 1 & 0 \\ -\sin(\theta) & 0 & \cos(\theta) \end{bmatrix} \]
\[ \mathbf{R}_z(\theta) = \begin{bmatrix} \cos(\theta) & -\sin(\theta) & 0 \\ \sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1 \end{bmatrix} \]
Compare [4]
四元数和旋转矩阵、旋转向量相比究竟有何优势? [5] [6]
平滑插值
内存和运算速度更优
- 内存上,一个四元数只占四个浮点数
- 在四元数相乘时可以直接在这四个数上进行加减乘的基本运算,比旋转向量转换成旋转矩阵相乘后再转换回旋转向量要高效得多(Rodrigues 变换还涉及除法和三角函数等高级运算)。这些在嵌入式平台上是不小的优势
浮点数运算总是会有误差的,运算越多,误差累计越多,所以理论上四元数相乘也有精度上的优势
旋转方式
active rotation: rotating vectors
passive rotation: rotating frames
旋转小量
若小旋转向量 \(\Delta \boldsymbol{\phi}\),则旋转小量 一阶近似
\[ \Delta \mathbf{R} = \exp({\Delta \boldsymbol{\phi}}^\wedge) \approx \mathbf{I} + {\Delta \boldsymbol{\phi}}^\wedge \]
\[ \Delta \mathbf{q} \approx \begin{bmatrix} 1 \\ \frac{1}{2} \Delta \boldsymbol{\phi} \end{bmatrix} \]
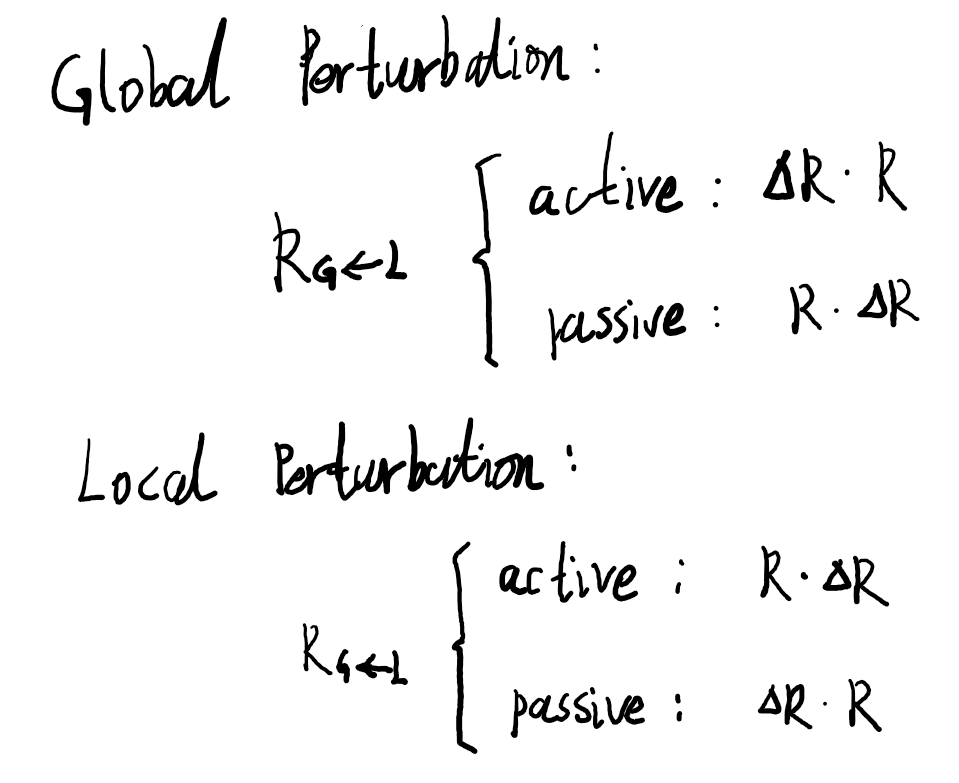
旋转扰动
Local Perturbation
Global Perturbation
旋转更新
\[ \boxplus(x, \Delta) \]
对于 Manifold空间 的状态 \(x\),因不能直接相加,取其 Tangent空间 小量,再将其映射回 Manifold空间。
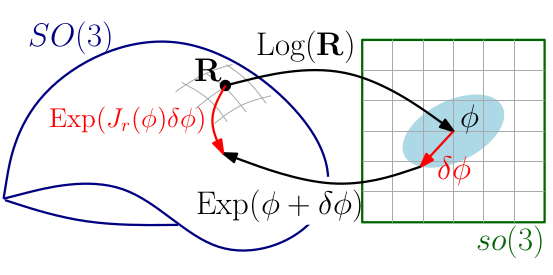
即(BCH公式)
\[ \exp((\theta + \delta \theta)^{\wedge}) \approx \exp({\theta}^{\wedge}) \cdot \exp((J_r \delta \theta)^{\wedge}) = R \cdot \exp((J_r \delta \theta)^{\wedge}) \]
而实际上,已知状态 旋转向量 \(\theta\),其对应旋转矩阵 \(R(\theta)\),旋转小量 \(\Delta R(\delta \theta)\) 或 \(\Delta q(\delta \theta)\) 对其进行更新,VINS-Mono、MSCKF、ORB-SLAM等开源代码中都是如下直接右乘
\[ \mathbf{R} \leftarrow \mathbf{R} \cdot \Delta \mathbf{R} \]
\[ \mathbf{q} \leftarrow \mathbf{q} \otimes \Delta \mathbf{q} \]
四元数形式
右乘更新(MSCKF、VINS-Mono)
\[ q^\prime = q \cdot \delta q, \quad \text{normalize} \; q^\prime, \quad s.t. \quad \delta q = \begin{bmatrix} 1 \\ \frac{1}{2} \delta \theta \end{bmatrix} \]
而实际上
\[ q(\theta + \delta \theta) = \exp(\frac{\theta + \delta \theta}{2}) \]
OKVIS中左乘
\[ q^\prime = \delta q \cdot q \]
1 | |
李群李代数形式
g2o中更新,左乘
\[ \exp({\delta \theta}^{\wedge}) \cdot R \]
1 | |
ORB-SLAM3中更新,右乘
\[ R \cdot \exp({\delta \theta}^{\wedge}) \]
1 | |
旋转残差
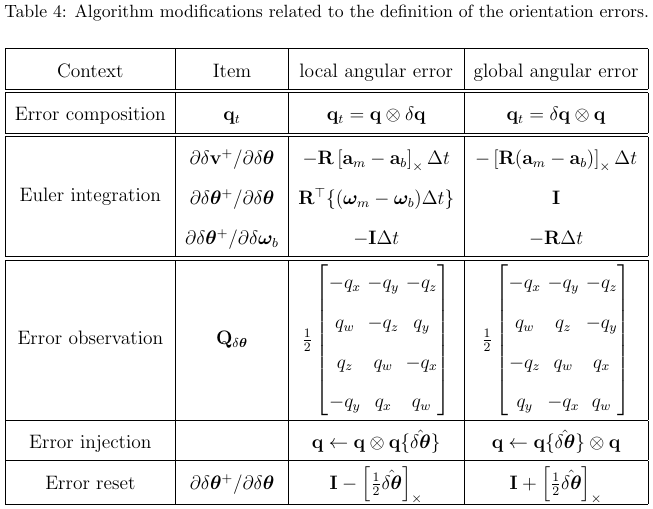
global angular error
\[ \Delta R = R_1 \cdot R_2^{-1} \]
local angular error (VINS-Mono & ORB-SLAM3)
\[ \Delta R = R_2^{-1} \cdot R_1 \]
不能像下面这样直接减:
\[ \delta \theta = \theta_1 - \theta_2 \longrightarrow \Delta R = R_1 \cdot R_2^{-1} \]
(1)四元数形式(VINS-Mono)
\[ \delta \theta = 2 \left[ q(\Delta R) \right]_{\mathtt{vec}} / q_w \]
(2)李群李代数形式
\[ \delta \theta = [\ln(\Delta R)]^{\vee} \]
g2o中,两个位姿为顶点时的残差:
1 | |
旋转导数 (雅克比矩阵)
对时间求导
若角速度为 \(\boldsymbol{\omega}\),那么旋转的时间导数为
\[ \dot{\mathbf{q}} = \mathbf{q} \otimes \begin{bmatrix} 0 \\ \frac{1}{2} \boldsymbol{\omega} \end{bmatrix} = \frac{1}{2} \mathbf{q} \otimes \begin{bmatrix} 0 \\ \boldsymbol{\omega} \end{bmatrix} \]
\[ \dot{\mathbf{R}}=\mathbf{R} \boldsymbol{\omega}^{\wedge} \]
对旋转求导
李代数求导
用李代数表示位姿,然后根据李代数加法来对李代数求导
\[ \begin{aligned} \frac{\partial(\mathbf{R} \mathbf{p})}{\partial \phi} &= \frac{\partial\left(\exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}\right)}{\partial \boldsymbol{\phi}} \\ &=\lim _{\delta \phi \rightarrow 0} \frac{\exp \left((\boldsymbol{\phi}+\delta \boldsymbol{\phi})^{\wedge}\right) \mathbf{p}-\exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}}{\delta \boldsymbol{\phi}} \\ &=\lim _{\delta \boldsymbol{\phi} \rightarrow 0} \frac{\exp \left(\left(\boldsymbol{J}_{l} \delta \boldsymbol{\phi}\right)^{\wedge}\right) \exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}-\exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}}{\delta \boldsymbol{\phi}} \\ & \approx \lim _{\delta \boldsymbol{\phi} \rightarrow 0} \frac{\left(\boldsymbol{I}+\left(\boldsymbol{J}_{l} \delta \boldsymbol{\phi}\right)^{\wedge}\right) \exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}-\exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}}{\delta \boldsymbol{\phi}} \\ &=\lim _{\delta \boldsymbol{\phi} \rightarrow 0} \frac{\left(\boldsymbol{J}_{l} \delta \boldsymbol{\phi}\right)^{\wedge} \exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}}{\delta \boldsymbol{\phi}} \\ &=\lim _{\delta \boldsymbol{\phi} \rightarrow 0} \frac{-\left(\exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}\right)^{\wedge} \boldsymbol{J}_{l} \delta \boldsymbol{\phi}}{\delta \boldsymbol{\phi}}=-(\mathbf{R} \mathbf{p})^{\wedge} \boldsymbol{J}_{l} \end{aligned} \]
其中,\(\mathbf{J}_l\) 为 \(SO(3)\) 的左雅克比矩阵,其定义为
\[ \boldsymbol{J}_{l}=\boldsymbol{J}=\frac{\sin \theta}{\theta} \boldsymbol{I}+\left(1-\frac{\sin \theta}{\theta}\right) \boldsymbol{a} \boldsymbol{a}^{T}+\frac{1-\cos \theta}{\theta} \boldsymbol{a}^{\wedge} \]
w.r.t Error State
\[ \frac{\partial f(x)}{\partial \delta x} = \frac{\partial f(x)}{\partial x} \cdot \frac{\partial x}{\partial \delta x} \]
对于 欧式空间
\[ \frac{\partial x}{\partial \delta x} = I \]
对于 流行空间,例如旋转 \(q\)
扰动方式
Note: 本质是 Local 或 Global 扰动
对李群左乘或者右乘微小扰动量,然后对该扰动求导,成为左扰动和右扰动模型,这种方式 省去了计算雅克比,所以使用更为常见
\[ \begin{aligned} \frac{\partial(\mathbf{R} \mathbf{p})}{\partial \boldsymbol{\phi}} &=\lim _{\boldsymbol{\varphi} \rightarrow 0} \frac{\exp \left(\boldsymbol{\varphi}^{\wedge}\right) \exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}-\exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}}{\varphi} \\ & \approx \lim _{\varphi \rightarrow 0} \frac{\left(I+\boldsymbol{\varphi}^{\wedge}\right) \exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}-\exp \left(\boldsymbol{\phi}^{\wedge}\right) \mathbf{p}}{\varphi} \\ &=\lim _{\boldsymbol{\varphi} \rightarrow 0} \frac{\boldsymbol{\varphi}^{\wedge} \mathbf{R} \mathbf{p}}{\varphi} \\ &=\lim _{\varphi \rightarrow 0} \frac{-(\mathbf{R} \mathbf{p})^{\wedge} \boldsymbol{\varphi}}{\varphi} \\ &=-(\mathbf{R} \mathbf{p})^{\wedge} \end{aligned} \]
\[ \begin{aligned} \frac{\partial{(\mathbf{R}^{-1} \mathbf{p})}}{\partial{\boldsymbol{\phi}}} &= \lim_{\varphi \rightarrow 0} \frac{(\mathbf{R}\exp(\varphi^{\wedge}))^{-1} \mathbf{p} - \mathbf{R}^{-1} \mathbf{p}} {\varphi} \\ &= \lim_{\varphi \rightarrow 0} \frac{\exp(-\varphi^{\wedge}) \mathbf{R}^{-1} \mathbf{p} - \mathbf{R}^{-1} \mathbf{p}} {\varphi} \\ &\approx \lim_{\varphi \rightarrow 0} \frac{(\mathbf{I}-\varphi^{\wedge}) \mathbf{R}^{-1} \mathbf{p} - \mathbf{R}^{-1} \mathbf{p}} {\varphi} \\ &= \lim_{\varphi \rightarrow 0} \frac{-\varphi^{\wedge} \mathbf{R}^{-1} \mathbf{p}} {\varphi} \\ &= \lim_{\varphi \rightarrow 0} \frac{(\mathbf{R}^{-1}\mathbf{p})^{\wedge} \varphi} {\varphi} \\ &= (\mathbf{R}^{-1}\mathbf{p})^{\wedge} \end{aligned} \]
\[ \begin{aligned} \frac{\partial \ln(\mathbf{R}_1 \mathbf{R}_2^{-1})^{\vee}}{\partial \boldsymbol{\phi}_2} &= \lim_{\varphi \rightarrow 0} \frac{\ln(\mathbf{R}_1 (\mathbf{R}_2 \exp(\varphi^{\wedge}))^{-1})^{\vee} - \ln(\mathbf{R}_1 \mathbf{R}_2^{-1})^{\vee}} {\varphi} \\ &= \lim_{\varphi \rightarrow 0} \frac{\ln(\mathbf{R}_1 \exp(-\varphi^{\wedge}) \mathbf{R}_2^{-1})^{\vee} - \ln(\mathbf{R}_1 \mathbf{R}_2^{-1})^{\vee}} {\varphi} \\ &= \lim_{\varphi \rightarrow 0} \frac{\ln(\mathbf{R}_1 \mathbf{R}_2^{-1} \exp((-\mathbf{R}_2 \varphi)^{\wedge}))^{\vee} - \ln(\mathbf{R}_1\mathbf{R}_2^{-1})^{\vee}} {\varphi} \\ &\approx \lim_{\varphi \rightarrow 0} \frac{\ln(\mathbf{R}_1\mathbf{R}_2^{-1})^{\vee} + \mathbf{J}_r^{-1} (-\mathbf{R}_2 \varphi) - \ln(\mathbf{R}_1\mathbf{R}_2^{-1})^{\vee}} {\varphi} \\ &= -\mathbf{J}_r^{-1} \mathbf{R}_2 \end{aligned} \]
对于矩阵A和B,\(\exp(A)\exp(B) \neq \exp(A+B)\),错误示例:
\[ r = \ln(R_1 \cdot R_2^T)^\vee = \ln \left[ \exp({\theta}_1^{\wedge}) \cdot \exp(-{\theta}_2^{\wedge}) \right]^\vee = {\theta}_1 - {\theta}_2 \]
四元数形式
\[ r = \delta \theta = 2 \left[ q_1 \otimes q_2^{-1} \right]_{xyz} = 2 \left[ q_1 \otimes q_2^{*} \right]_{xyz} \]
\[ \begin{aligned} \frac{\partial r}{\partial \delta {\theta}_2} &= \frac{\partial 2 \left[ q_1 \otimes q_2^{*} \right]_{xyz}}{\partial \delta {\theta}_2} \\ &= \frac {\partial 2 \left[ q_1 \otimes \left[ q_2 \otimes \delta q_2 \right]^{*} \right]_{xyz}} {\partial \delta {\theta}_2} \\ &= -2 \begin{bmatrix} 0 & I \end{bmatrix}_{3 \times 4} \cdot \frac{\partial \left[ q_2 \otimes \delta q_2 \otimes q_1^* \right]} {\partial \delta {\theta}_2} \\ &= -2 \begin{bmatrix} 0 & I \end{bmatrix}_{3 \times 4} \cdot \frac{\partial \left[ L(q_2) \cdot R(q_1^*) \cdot \delta q_2 \right]} {\partial \delta q_2} \cdot \frac{\partial \delta q_2} {\partial {\theta}_2} \\ &= -2 \begin{bmatrix} 0 & I \end{bmatrix}_{3 \times 4} \cdot L(q_2) \cdot R(q_1^*) \cdot \frac{\partial \begin{bmatrix} 1 \\ \frac{1}{2} {\theta}_2 \end{bmatrix}} {\partial {\theta}_2} \\ &= - \begin{bmatrix} 0 & I \end{bmatrix}_{3 \times 4} \cdot L(q_2) \cdot R(q_1^*) \cdot \begin{bmatrix} 0 \\ I \end{bmatrix}_{4 \times 3} \end{aligned} \]
Check Jacobian Matrix [3]
根据
\[ J = f^{\prime}(x + \Delta x) = \lim_{\Delta x \rightarrow 0} \frac{f(x + \Delta x)-f(x)}{\Delta x} \]
验证
\[ J \Delta x \approx f(x + \Delta x)-f(x) \]
Eg. code: imu_x_fusion
1 | |