Multi-Sensor Fusion: LiDAR and Radar fusion based on EKF
Last updated on March 2, 2026 pm
[TOC]
Overview
System State Vector
\[ x = [p_x, p_y, v_x, v_y]^T \in \mathbb{R}^{4 \times 1} \]
State Transition & Measurement Function
State transition function:
\[ x^{\prime}=f(x)+\nu \]
Measurement function:
\[ z=h\left(x^{\prime}\right)+\omega \]
其中,\(f(x)\) 和 \(h(x)\) 非线性,通过一阶泰勒展开可被线性化为
\[ f(x) \approx f(\mu)+\underbrace{\frac{\partial f(\mu)}{\partial x}}_{F_{j}}(x-\mu) \]
\[ h(x) \approx h(\mu)+\underbrace{\frac{\partial h(\mu)}{\partial x}}_{H_{j}}(x-\mu) \]
Kalman Filter Algorithm
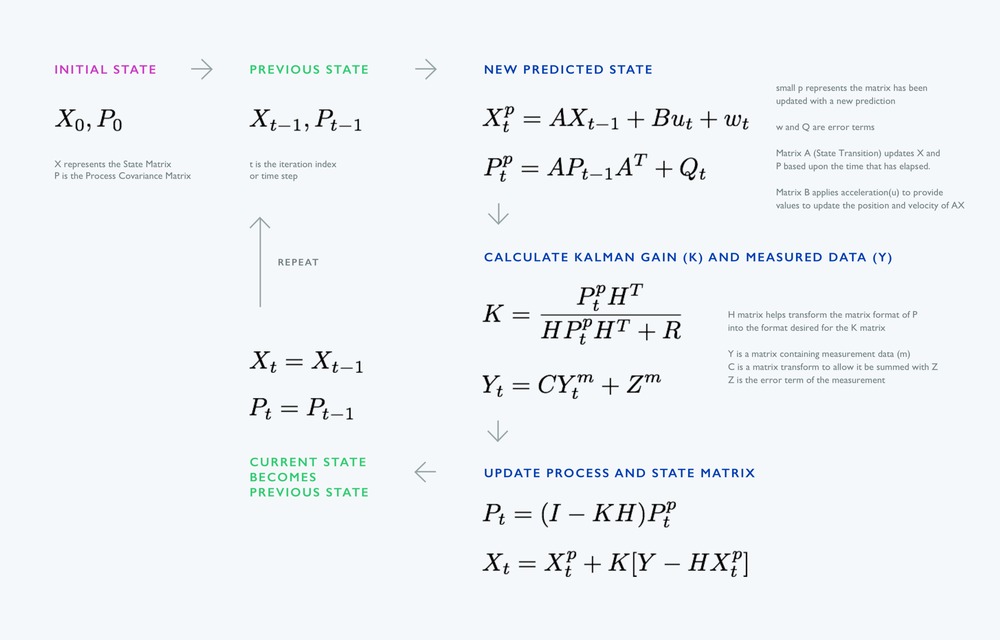
State Prediction:
\[ \begin{aligned} x^{\prime}_k &= F x_{k-1} + \nu_k, \quad u = 0 \\ P^{\prime}_k &= F P_{k-1} F^{T} + Q_k \end{aligned} \]
Measurement Update:
\[ y_k = z_k - H x^{\prime}_k \]
\[ S = H P^{\prime}_k H^{T}+R \]
\[ K = P^{\prime}_k H^{T} S^{-1} \]
\[ \begin{aligned} x_k &= x^{\prime}_k + K y_k \\ P_k &= (I-K H) P^{\prime}_k \end{aligned} \]
EKF Fusion Process
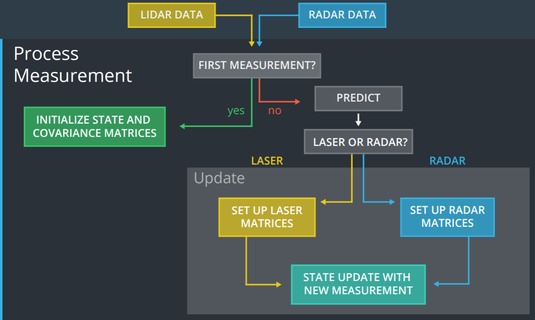
Initialization
- system state vector dimension: \(n = 4\)
- timestep: \(t_0\)
- system state vector: \(x_0 \in \mathbb{R}^{4 \times 1}\)
- process covariance matrix: \(P_0\)
- system state transition matrix: \(F_0 = I_{4 \times 4}\)
- process noise covariance matrix: \(Q_0 = 0_{4 \times 4}\)
Prediction
当前时间戳与上一测量数据时间戳的偏移(timeoffset)
\[ \Delta t = t_k - t_{k-1} \]
状态转移方程
\[ x^{\prime} = f(x) + \nu \]
2D常加速度运动模型 为
\[ \left\{\begin{array}{l} {p_{x}^{\prime}=p_{x}+v_{x} \Delta t+\frac{a_{x} \Delta t^{2}}{2}} \\ {p_{y}^{\prime}=p_{y}+v_{y} \Delta t+\frac{a_{y} \Delta t^{2}}{2}} \\ {v_{x}^{\prime}=v_{x}+a_{x} \Delta t} \\ {v_{y}^{\prime}=v_{y}+a_{y} \Delta t} \end{array}\right. \]
写成矩阵形式
\[ \left(\begin{array}{c} {p_{x}^{\prime}} \\ {p_{y}^{\prime}} \\ {v_{x}^{\prime}} \\ {v_{y}^{\prime}} \end{array}\right) = \left(\begin{array}{cccc} {1} & {0} & {\Delta t} & {0} \\ {0} & {1} & {0} & {\Delta t} \\ {0} & {0} & {1} & {0} \\ {0} & {0} & {0} & {1} \end{array}\right) \left(\begin{array}{l} {p_{x}} \\ {p_{y}} \\ {v_{x}} \\ {v_{y}} \end{array}\right) + \left(\begin{array}{c} {\frac{a_{x} \Delta t^{2}}{2}} \\ {\frac{a_{y} \Delta t^{2}}{2}} \\ {a_{x} \Delta t} \\ {a_{y} \Delta t} \end{array}\right) \]
抽象简写为
\[ x^{\prime}=Fx + v \]
其中
\[ v \sim N(0, Q) \]
State Transition Matrix
\[ F = \left(\begin{array}{cccc} {1} & {0} & {\Delta t} & {0} \\ {0} & {1} & {0} & {\Delta t} \\ {0} & {0} & {1} & {0} \\ {0} & {0} & {0} & {1} \end{array}\right) \]
Process Noise Covariance Matrix
由上式
\[ \nu= \left(\begin{array}{c} {\nu_{p x}} \\ {\nu_{p y}} \\ {\nu_{v x}} \\ {\nu_{v y}} \end{array}\right) = \left(\begin{array}{c} {\frac{a_{x} \Delta t^{2}}{2}} \\ {\frac{a_{y} \Delta t^{2}}{2}} \\ {a_{x} \Delta t} \\ {a_{y} \Delta t} \end{array}\right) = \underbrace{ \left(\begin{array}{cc} {\frac{\Delta t^{2}}{2}} & {0} \\ {0} & {\frac{\Delta t^{2}}{2}} \\ {\Delta t} & {0} \\ {0} & {\Delta t}\end{array}\right)}_{G} \underbrace{\left(\begin{array}{l}{a_{x}} \\ {a_{y}}\end{array}\right)}_{a} = Ga \]
根据 \(v \sim N(0, Q)\)
\[ Q=E\left[\nu \nu^{T}\right]=E\left[G a a^{T} G^{T}\right] \]
因为 \(G\) 不包含随机变量,将其移出
\[ Q = G E\left[a a^{T}\right] G^{T} = G \left(\begin{array}{cc} {\sigma_{a x}^{2}} & {\sigma_{a x y}} \\ {\sigma_{a x y}} & {\sigma_{a y}^{2}} \end{array}\right) G^{T} = G Q_{\nu} G^{T} \]
\(a_x\) 和 \(a_y\) 假设不相关,则
\[ Q_{\nu} = \left(\begin{array}{cc} {\sigma_{a x}^{2}} & {\sigma_{a x y}} \\ {\sigma_{a x y}} & {\sigma_{a y}^{2}} \end{array}\right) = \left(\begin{array}{cc} {\sigma_{a x}^{2}} & {0} \\ {0} & {\sigma_{a y}^{2}} \end{array}\right) \]
最终
\[ Q = G Q_{\nu} G^{T} = \left(\begin{array}{cccc} {\frac{\Delta t^{4}}{4} \sigma_{a x}^{2}} & {0} & {\frac{\Delta t^{3}}{2} \sigma_{a x}^{2}} & {0} \\ {0} & {\frac{\Delta t^{4}}{4} \sigma_{a y}^{2}} & {0} & {\frac{\Delta t^{3}}{2} \sigma_{a y}^{2}} \\ {\frac{\Delta t^{3}}{2} \sigma_{a x}^{2}} & {0} & {\Delta t^{2} \sigma_{a x}^{2}} & {0} \\ {0} & {\frac{\Delta t^{3}}{2} \sigma_{a y}^{2}} & {0} & {\Delta t^{2} \sigma_{a y}^{2}} \end{array}\right) \]
Measurement Update
测量方程
\[ z = h(x^{\prime}) + \omega \]
Lidar Measurements
Lidar测量方程
\[ z = \left(\begin{array}{c}{p_{x}} \\ {p_{y}}\end{array}\right) = \left(\begin{array}{cccc} {1} & {0} & {0} & {0} \\ {0} & {1} & {0} & {0} \end{array}\right) \left(\begin{array}{c} {p_{x}^{\prime}} \\ {p_{y}^{\prime}} \\ {v_{x}^{\prime}} \\ {v_{y}^{\prime}} \end{array}\right) \]
简写为
\[ z = H x^{\prime} + \omega \quad s.t. \quad \omega \sim N(0,R) \]
上式中的状态转移矩阵H,也即 Measurement Jacobian Matrix
\[ H = \left(\begin{array}{cccc} {1} & {0} & {0} & {0} \\ {0} & {1} & {0} & {0} \end{array}\right) \]
Lidar Measurement Noise Covariance Matrix
\[ R = E\left[\omega \omega^{T}\right] = \left(\begin{array}{cc} {\sigma_{p x}^{2}} & {0} \\ {0} & {\sigma_{p y}^{2}} \end{array}\right) \]
Radar Measurements

Radar测量方程
\[ z = \left(\begin{array}{l} {\rho} \\ {\varphi} \\ {\dot{\rho}} \end{array}\right) = h(x^{\prime}) + \omega = \left(\begin{array}{c} {\sqrt{p_{x}^{\prime 2}+p_{y}^{\prime 2}}} \\ {\arctan \left(p_{y}^{\prime} / p_{x}^{\prime}\right)} \\ {\frac{p_{x}^{\prime} v_{x}^{\prime}+p_{y} v_{y}^{\prime}}{\sqrt{p_{x}^{\prime 2}+p_{y}^{\prime 2}}}} \end{array}\right) + \omega \quad s.t. \quad \omega \sim N(0,R) \]
- range \(\rho\): the radial distance from the origin to our pedestrian
- bearing \(\varphi\): the angle between the ray and x direction
- range rate \(\dot{\rho}\): known as Doppler or radial velocity is the velocity along this ray
Measurement Jacobian Matrix
\[ H = \left[\begin{array}{llll} {\frac{\partial \rho}{\partial p_{x}}} & {\frac{\partial \rho}{\partial p_{y}}} & {\frac{\partial \rho}{\partial v_{x}}} & {\frac{\partial \rho}{\partial v_{y}}} \\ {\frac{\partial \varphi}{\partial p_{x}}} & {\frac{\partial \varphi}{\partial p_{y}}} & {\frac{\partial \varphi}{\partial v_{x}}} & {\frac{\partial \varphi}{\partial v_{y}}} \\ {\frac{\partial \dot{\rho}}{\partial p_{x}}} & {\frac{\partial \rho}{\partial p_{y}}} & {\frac{\partial \dot{\rho}}{\partial v_{x}}} & {\frac{\partial \rho}{\partial v_{y}}} \end{array}\right] = \left[\begin{array}{cccc} {\frac{p_{x}}{\sqrt{p_{x}^{2}+p_{y}^{2}}}} & {\frac{p_{y}}{\sqrt{p_{x}^{2}+p_{y}^{2}}}} & {0} & {0} \\ {-\frac{p_{y}}{p_{x}^{2}+p_{y}^{2}}} & {\frac{p_{x}}{p_{x}^{2}+p_{y}^{2}}} & {0} & {0} \\ {\frac{p_{y}\left(v_{x} p_{y}-v_{y} p_{x}\right)}{\left(p_{x}^{2}+p_{y}^{2}\right)^{3 / 2}}} & {\frac{p_{x}\left(v_{y} p_{x}-v_{x} p_{y}\right)}{\left(p_{x}^{2}+p_{y}^{2}\right)^{3 / 2}}} & {\frac{p_{x}}{\sqrt{p_{x}^{2}+p_{y}^{2}}}} & {\frac{p_{y}}{\sqrt{p_{x}^{2}+p_{y}^{2}}}} \end{array}\right] \]
Radar Measurement Noise Covariance Matrix
\[ R = \left(\begin{array}{ccc} {\sigma_{\rho}^{2}} & {0} & {0} \\ {0} & {\sigma_{\varphi}^{2}} & {0} \\ {0} & {0} & {\sigma_{\dot{\rho}}^{2}} \end{array}\right) \]
R 表示了测量值的不确定度,一般由传感器的厂家提供
Reference
- Self-Driving Car ND - Sensor Fusion - Extended Kalman Filters