B-Spline for SLAM
Last updated on March 2, 2026 pm
Overview
to convert a set of trajectory points into a continuous-time uniform cubic cumulative b-spline
Uniform Cubic B-Splines in \(\mathbb{SE(3)}\)
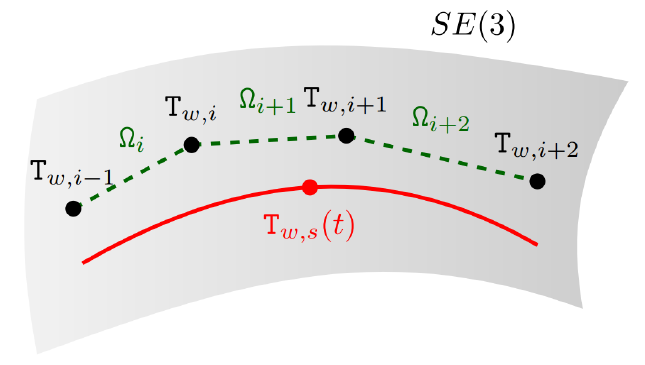
Continuous and Discrete Time
- 离散时间
- 通过IMU运动学模型,进行IMU预积分
- 跟Cam时间戳对齐
- 联合优化
- 连续时间
- Cam位姿BSpline拟合连续位姿
- 位姿微分
Applications
路径规划 轨迹优化
连续时间轨迹估计
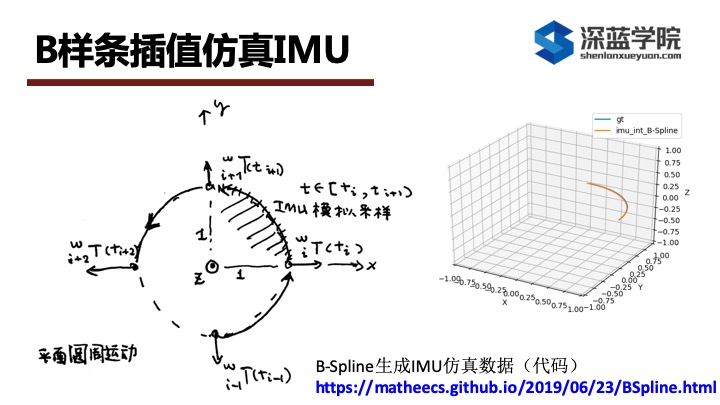
IMU插值与数据仿真
IMU数据仿真
- https://docs.openvins.com/classov__core_1_1BsplineSE3.html
- https://matheecs.tech/study/2019/06/23/BSpline.html
- 从已有轨迹生成imu数据推导
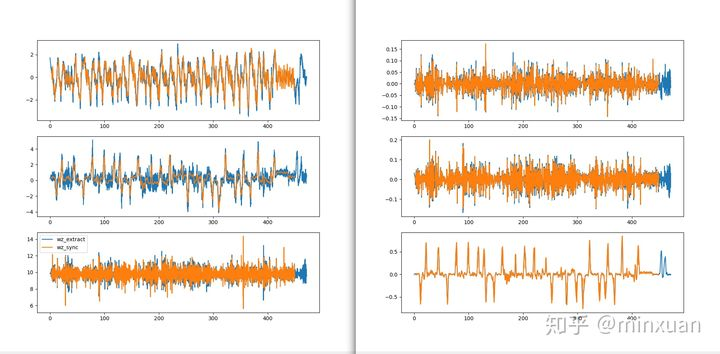
Unsynchronized multi-sensor intrinsic and extrinsic least-squares calibration
IMU与Cam的相机外参标定
ref:
camera-imu外参标定大体上分为三步:
- 粗略估计camera与imu之间时间延时。
- 利用camera的样条曲线获取任意时刻camera旋转角速度,而陀螺仪又测量imu的角速度
- 现在利用两个曲线的相关性,可以粗略估计imu和camera时间延时
- 获取imu-camera之间初始旋转,还有一些必要的初始值:重力加速度、陀螺仪偏置。
- 大优化,包括所有的角点重投影误差、imu加速度计与陀螺仪测量误差、偏置随机游走噪声。
B-Spline for SLAM
https://cgabc.xyz/posts/1022444e/