(Paper Reading) A Novel Feedback Mechanism-Based Stereo Visual-Inertial SLAM
Last updated on November 26, 2023 pm
Overview
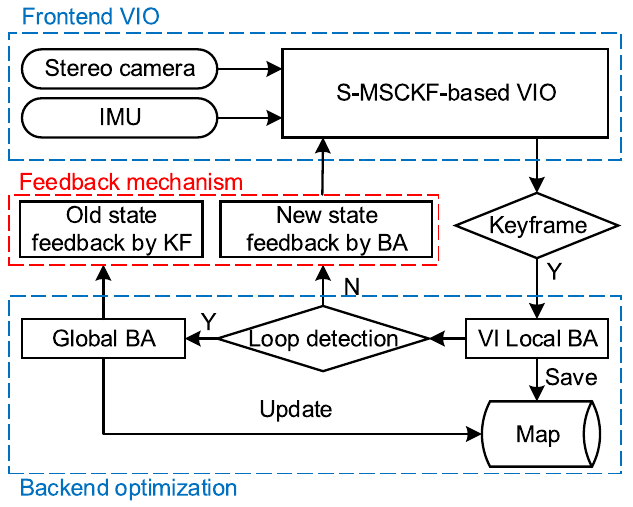
- the filtering-based frontend VIO
- the optimization-based backend with loop closure
- the state feedback
Inspired by the idea of [38], we feed the optimized state produced by the backend back to the frontend to correct the state estimation
The frontend is used for pose estimation and map construction, whereas the backend is responsible for loop closure detection and pose optimization.
FRONTEND VIO
BACKEND OPTIMIZATION
The local BA optimizes the last N frames in the sliding window and all map points seen by those N frames.
FEEDBACK MECHANISM
- the common KF update rule for the old state
- the nonlinear optimization method for the new state
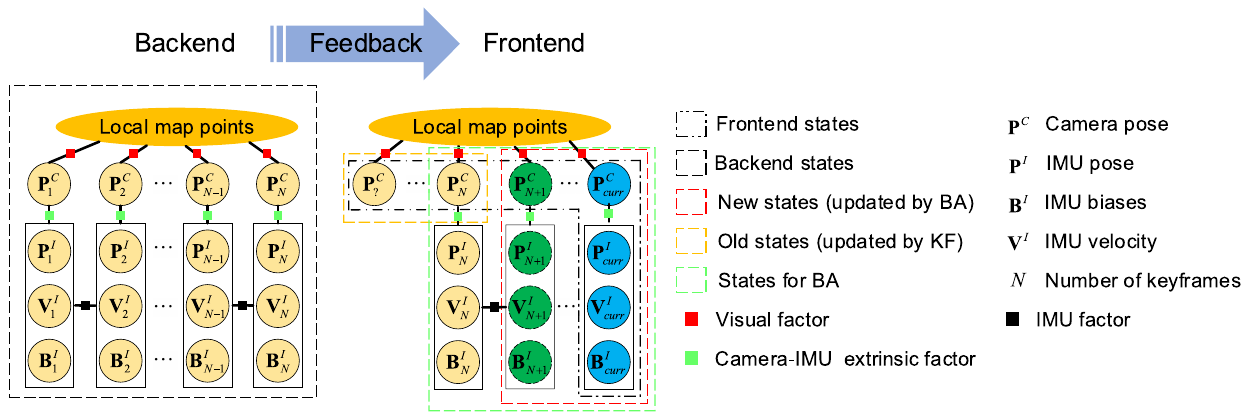
OLD STATE UPDATE
NEW STATE UPDATE
we only use the last keyframe and the new frames for optimization through minimizing the objective function which is the same with (1).
RELOCALIZATION
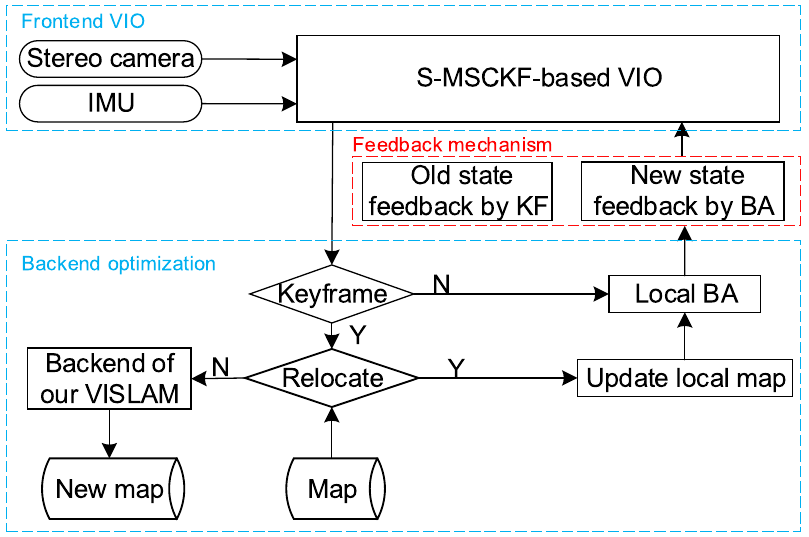
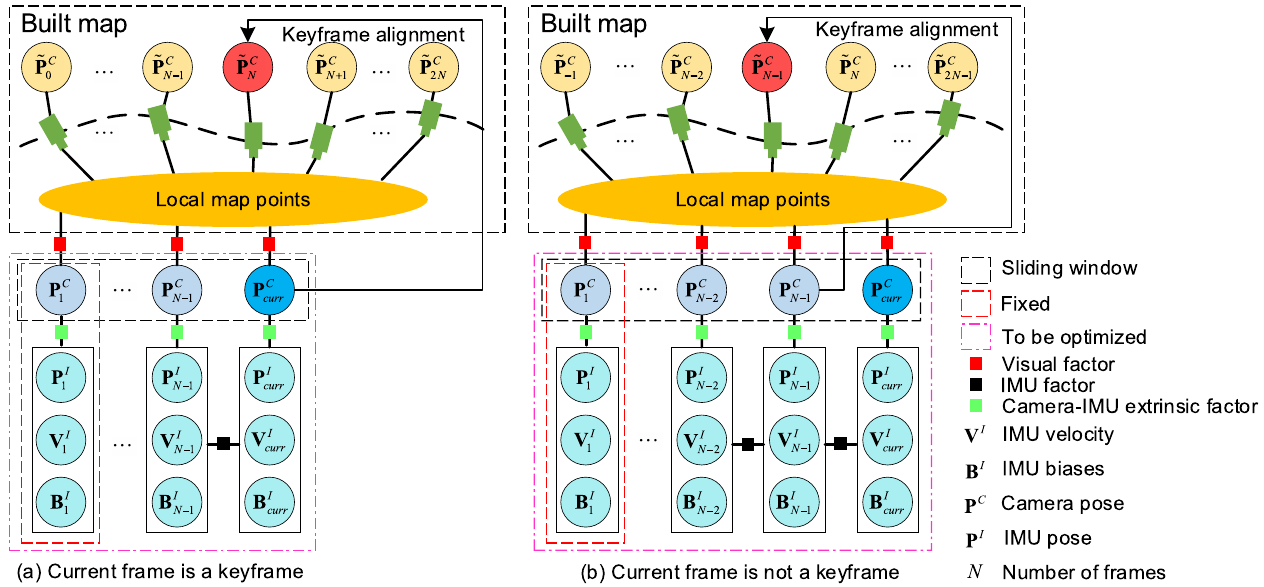
Then N keyframes before and after the aligned keyframe are selected to update the local map points by retrieving the points corresponding to the keyframes in the built map.