基于RGBD相机的多模态结构特征融合定位 (Draft)
Last updated on March 2, 2026 pm
[TOC]
概述
目前基于RGBD相机的视觉SLAM系统,都是基于特征点或者稠密点云进行定位,计算量大,而且在无纹理或弱纹理的环境,容易跟丢,鲁棒性较差。本文提出了一种基于RGBD相机的多模态结构化数据融合定位方法,算法主要框架如下图所示,通过充分利用视觉特征,融合二维特征点、二维曲线(边缘点)、二维线段和三维平面等,结合状态估计算法进行实时、鲁邦、准确的位姿估计。在二维特征点的基础上,同时提取边缘特征,使其在弱纹理的环境也能快速、鲁棒定位;另外,在每个关键帧提取2D线段和3D平面等特征,在不增加较多计算量的情况下,引入更多稳定的视觉约束,使位姿估计更准确。
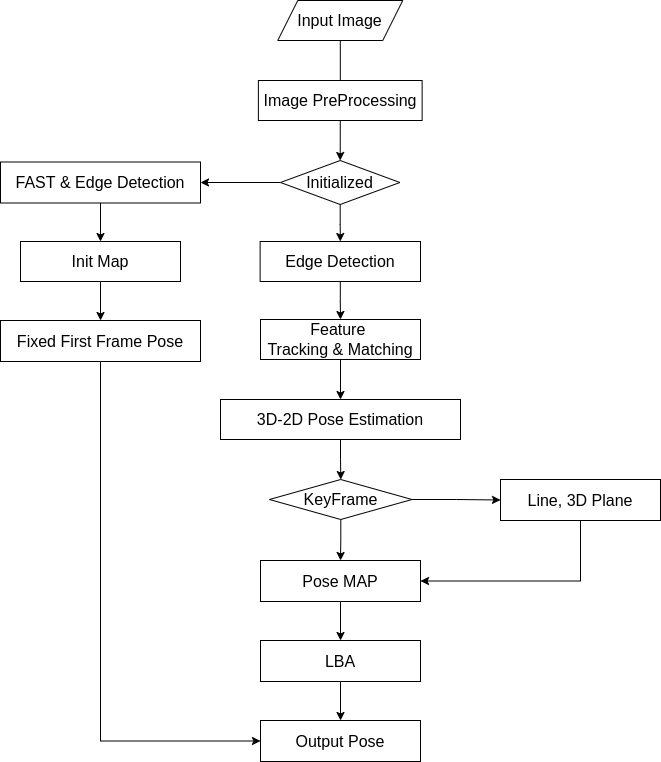
初始化
(1)在第一帧图像提取FAST特征点和进行边缘检测
(2)根据深度图,通过相机投影模型,得到对应的3D路标点,创建初始地图
(3)固定第一帧位姿为单位阵
数据降维
我们将输入的图像(灰度图和深度图),进行特征提取,获取一些不变的特征,为后面的状态估计提供数据支持。本算法用到的视觉特征主要包括以下四种:
- 点
- 2D特征点
- 线
- 2D线段
- 2D曲线或边缘点
- 面
- 3D平面
特征提取
2D图像特征检测
- 2D特征点:FAST / ORB
- 2D线段:LSD
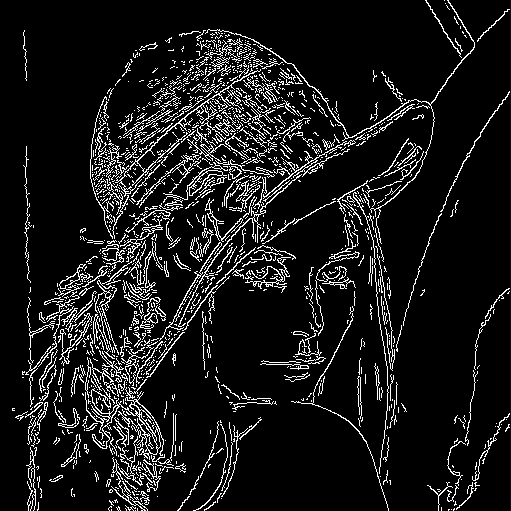
- 2D曲线或边缘点:Canny边缘检测


3D点云平面提取

3D平面特征是SLAM系统中减小漂移误差的一种稳定标志。从密集点云中提取平面是一种简单的方法,常用于RGB-D相机或激光雷达。但基于稠密点云提取平面,算力较高,不利于SLAM定位的实时性;我们利用RANSAC方法从上面得到的稀疏路标点中提取3D平面。
(1)根据2D特征点和2D边缘点对应的路标点(见下面三角化章节)作为输入的3D稀疏点云
(2)随机选取三个不共线的点,计算平面参数(质心和法向量,其表示可见下面3D路标表示章节)
(3)计算稀疏点云中每个点到平面的距离,并累加,记录距离累加和、平面参数
(4)重复步骤(2)~(3),获取距离累加和最小时的平面参数
(5)收集内点:计算所有点到该平面的距离,并设定阈值,小于阈值的所有点即为平面点内点
(6)计算所有内点的均值为最终平面的 质心
(7)根据均值计算其 协方差矩阵,对该矩阵进行奇异值分解,对应奇异值最小的奇异向量即为最终平面的 法向量
example code:
数据关联
我们在提取了2D特征后,需要通过2D特征间的匹配,三角化得到3D路标,并与对应的2D特征进行关联;同时,为了兼顾实时性和高性能,还要提取关键帧。
2D特征匹配
- 2D特征点:光流跟踪 / ORB描述子匹配
- 2D线段:LBD描述子匹配
- 2D曲线或边缘点(点云):通过 距离变换 进行 倒角匹配
- 3D平面:根据两平面参数(法向量和质心),计算法向量之间的夹角以及质心间的欧式距离,作为平面匹配的相似度,据此进行匹配
3D路标及其参数化表示
3D路标点
\[ P = [X, Y, Z]^T \]
(1)2D特征点和2D边缘点对应的3D路标点,初始在深度图中提取
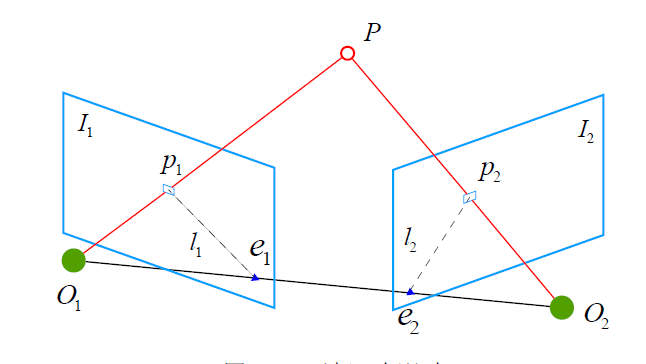
(2)因深度图距离限制、空洞(深度缺失)以及3D路标点质量较差被剔除等因素,需要后续补充3D路标点,通过对极几何的极线搜索算法,三角化出3D路标点,如下图所示
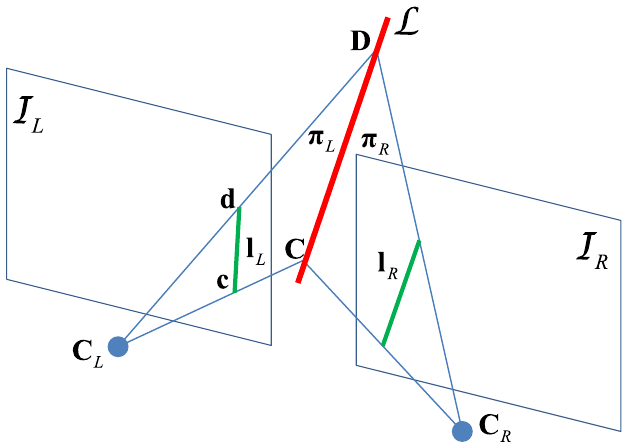
3D直线
3D空间直线有4个自由度,其表示方式主要有两种:普吕克坐标和正交表示。
普吕克坐标
\[ \mathcal{L}=\left(\mathbf{n}^{\top}, \mathbf{v}^{\top}\right)^{\top} \in \mathbb{R}^6 \]
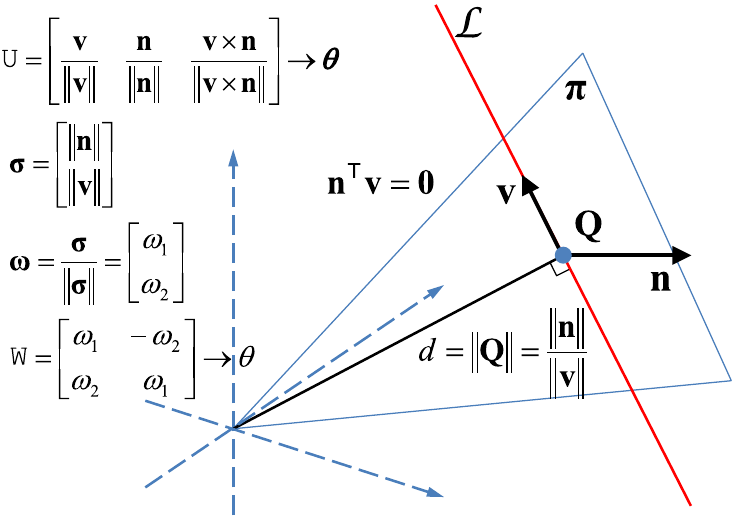
正交表示
\[ (\mathrm{U}, \mathrm{W}) \in S O(3) \times S O(2) \longrightarrow \left[ \boldsymbol{\theta} \; \theta \right] \in \mathbb{R}^4 \]
通常,为方便表示空间直线,我们使用普吕克坐标;但由于其具有6个变量,多于空间直线的4个自由度,在优化时会出现 过参数化问题,因此优化中使用其正交表示。
通过在两个视图图像中提取到的2D线段进行匹配,线段匹配对三角化出空间直线(普吕克坐标表示),并与2D线段进行关联。
3D平面
欧式空间3D平面有3个自由度,在本算法中对其表示方式主要有两种:Hesse形式、球坐标。
Hesse形式
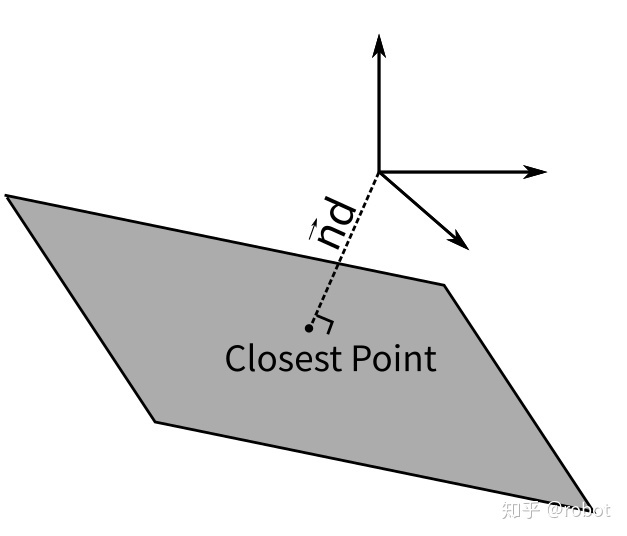
\[ \pi=\left(\mathbf{n}^{\top}, d\right)^{\top} \in \mathbb{R}^4 \]
球坐标
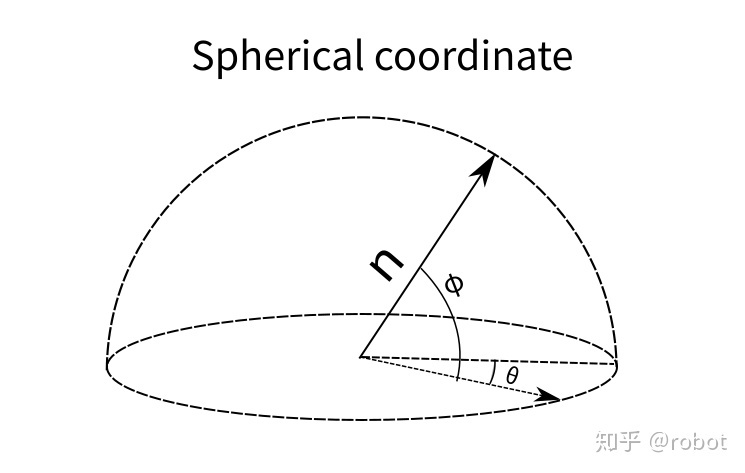
\[ \tau=(\theta, \phi, d)^{\top}= q(\pi)=\left(\theta=\arctan \frac{n_{y}}{n_{x}}, \; \phi=\arcsin n_{z}, \; d\right)^{\top} \]
一般优化中采用球坐标的表示方式
关键帧选取
主要根据时空两大方面,对关键帧进行选取。
(1)时间:经过一定数量的帧数
(2)空间:当当前帧距离上一关键帧的位姿变换超过一定阈值
状态估计
初始位姿估计
利用2D点特征和3D路标点,通过PNP算法,进行初始位姿估计。
后端优化
优化变量为当前帧相机位姿
\[ X = \left[ t_x, t_y, t_z, \theta_x, \theta_y, \theta_z \right]^T \]
定义总体目标函数如下
\[ {X}^{*} = \arg \min_{X} \left\{ \sum \rho\left( \left\|\mathbf{r}_{point}\right\|^{2} \right) + \sum \rho \left( \left\|\mathbf{r}_{edge} \right\|^2 \right) + \sum \rho \left( \left\|\mathbf{r}_{line} \right\|^2 \right) + \sum \rho \left( \left\|\mathbf{r}_{plane} \right\|^2 \right) \right\} \]
特征点
(1)通过FAST或者光流法跟踪在参考关键帧图像上得到2D特征点,并得到与其关联的3D路标点。
(2)根据当前帧与参考帧间的位姿,将上述3D路标点投影到当前帧图像上,作为投影预测值。
(3)在当前帧图像上检测到的2D特征点中,找到与参考帧匹配的2D特征点,作为观测值。
(4)计算观测特征点到投影点的欧式距离,即重投影误差,作为观测残差。
残差定义为
\[ r_{point} = u - K \cdot T_{cr} P_r \]
线段
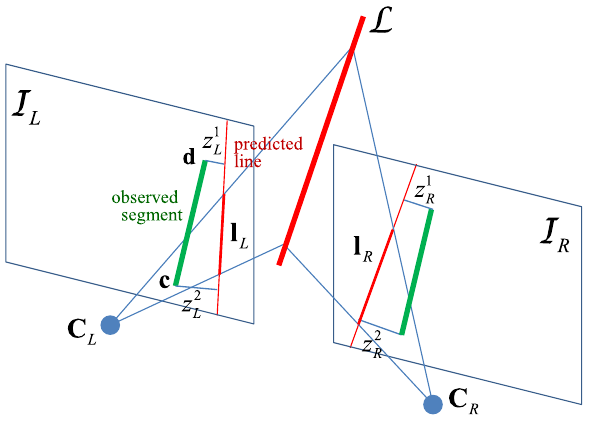
(1)通过LSD算法在参考关键帧图像上提取到2D线段特征,并得到与其关联的3D空间直线。
(2)根据当前帧与参考帧间的位姿,将上述3D空间直线投影到当前帧图像上,作为投影预测值。
(3)在当前帧图像上检测到的2D线段中,找到与参考帧匹配的2D线段,作为观测值。
(4)计算观测线段两个端点到投影直线的欧式距离,即线重投影误差,作为观测残差。
残差定义为
\[ r_{line} = D(z, L, T_{cw}) \]
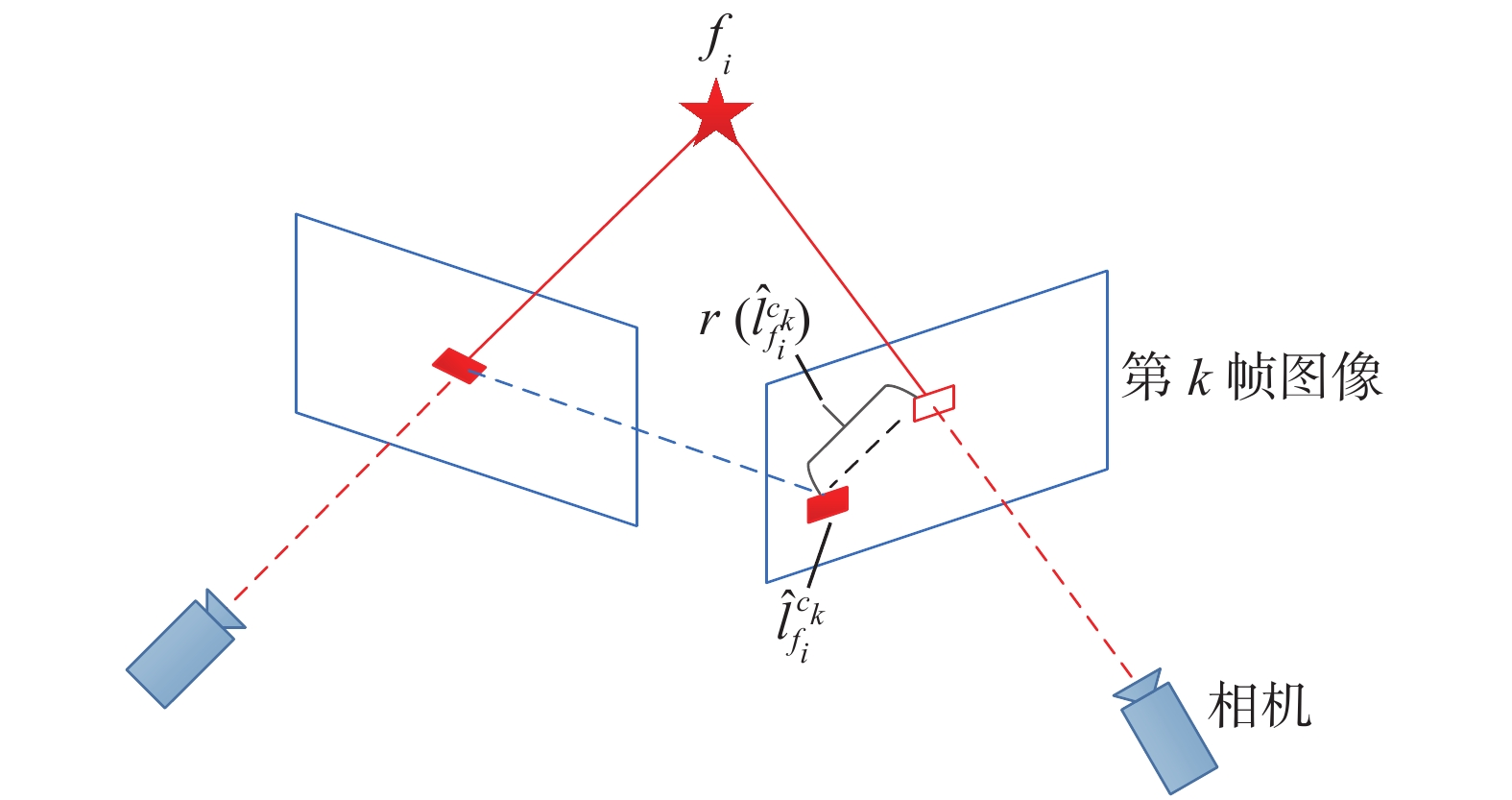
曲线或边缘点(ICP)
通过Canny边缘检测算法,在参考帧 \(F_{ref}\) 中检测到2D边缘点 \(\mathbf{p}_{i}^{\mathcal{F}_{\text {ref}}}\) ,根据相机投影模型和深度图像,得到 3D边缘点,如下
\[ \mathcal{S}^{\mathcal{F}_{\text {ref }}}=\left\{\mathbf{s}_{i}^{\mathcal{F}_{\text {ref }}}\right\}=\left\{d_{i}^{\mathcal{F}_{\text {ref }}} \pi^{-1}\left(\mathbf{p}_{i}^{\mathcal{F}_{\text {ref }}}\right)\right\} \]
根据当前帧与参考帧间的位姿,将上述3D点投影到当前帧 \(F_k\),得到2D点 \(\mathbf{o}_{i}^{\mathcal{F}_{k}}\),如下
\[ \mathcal{O}^{\mathcal{F}_{k}}=\left\{\mathbf{o}_{i}^{\mathcal{F}_{k}}\right\}=\left\{\pi\left(\mathbf{R}^{\mathrm{T}}\left(\mathbf{s}_{i}^{\mathcal{F}_{\text {ref }}}-\mathbf{t}\right)\right)\right\} \]
在当前帧检测到的2D点 \(P^{F_K}\) 中找到 \(\mathbf{o}_{i}^{\mathcal{F}_{k}}\) 的最近邻点,定义公式如下
\[ n\left(\mathbf{o}_{i}^{\mathcal{F}_{k}}\right)=\underset{\mathbf{p}_{j}^{\mathcal{F}_{k}} \in \mathcal{P}^{\mathcal{F}_{k}}}{\operatorname{argmin}}\left\|\mathbf{p}_{j}^{\mathcal{F}_{k}}-\mathbf{o}_{i}^{\mathcal{F}_{k}}\right\| \]
残差定义为
\[ r_{edge} = \mathbf{o}_{i}^{\mathcal{F}_{k}}-n\left(\mathbf{o}_{i}^{\mathcal{F}_{k}}\right) \]
定义目标函数
\[ X^*=\underset{X}{\operatorname{argmin}} \sum_{i=1}^{N}\left\|\mathbf{o}_{i}^{\mathcal{F}_{k}}-n\left(\mathbf{o}_{i}^{\mathcal{F}_{k}}\right)\right\|^{2} \]
平面
(1)通过RANSAC算法在参考关键帧提取世界坐标系的3D平面。
(2)根据参考帧的位姿 \(T_{rw}\) 以及当前帧与参考帧间的位姿 \(T_{cr}\),将上述3D平面投影到当前帧,作为预测值。
(3)在当前帧提取3D平面,找到与参考帧匹配的3D平面,作为观测值。
(4)计算观测值与预测值之间的误差,作为观测残差。
残差定义为
\[ r_{plane} = q(\pi_c^w) - q(T_{cr}^{-1} T_{rw}^{-1} \pi_r^w) \]