Intel RealSense Cameras: D435i, T265, ZR300
Last updated on March 2, 2026 pm
[TOC]
Overview
https://www.intelrealsense.com/developers/
Install and Run [2]
Install SDK
Add Keys
1 | |
Add Repositories
1 | |
Install Libs
1 | |
Install Dev and Debug tools
1 | |
Install ROS
1 | |
Run
1 | |
run with ROS
1 | |
run multiple RS Cams
- https://github.com/cggos/ccv/blob/master/apps/camkit/rs_cam/ros/rs_multiple_devices.launch
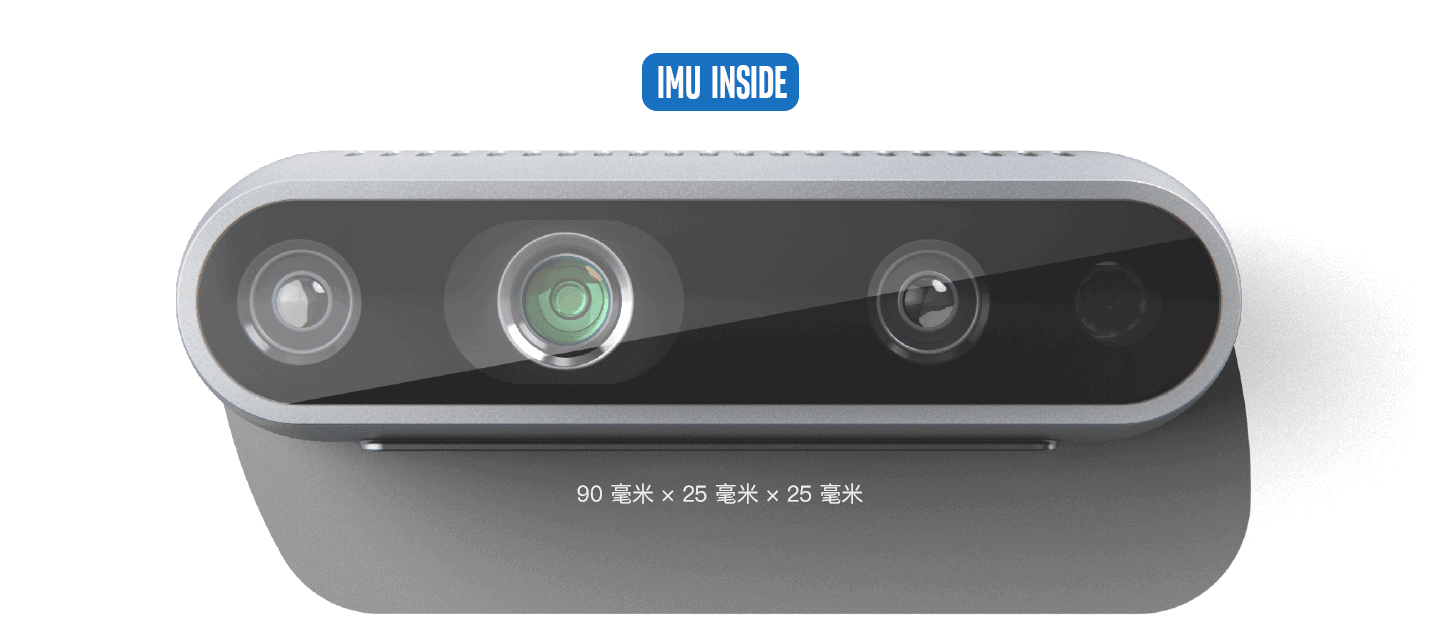
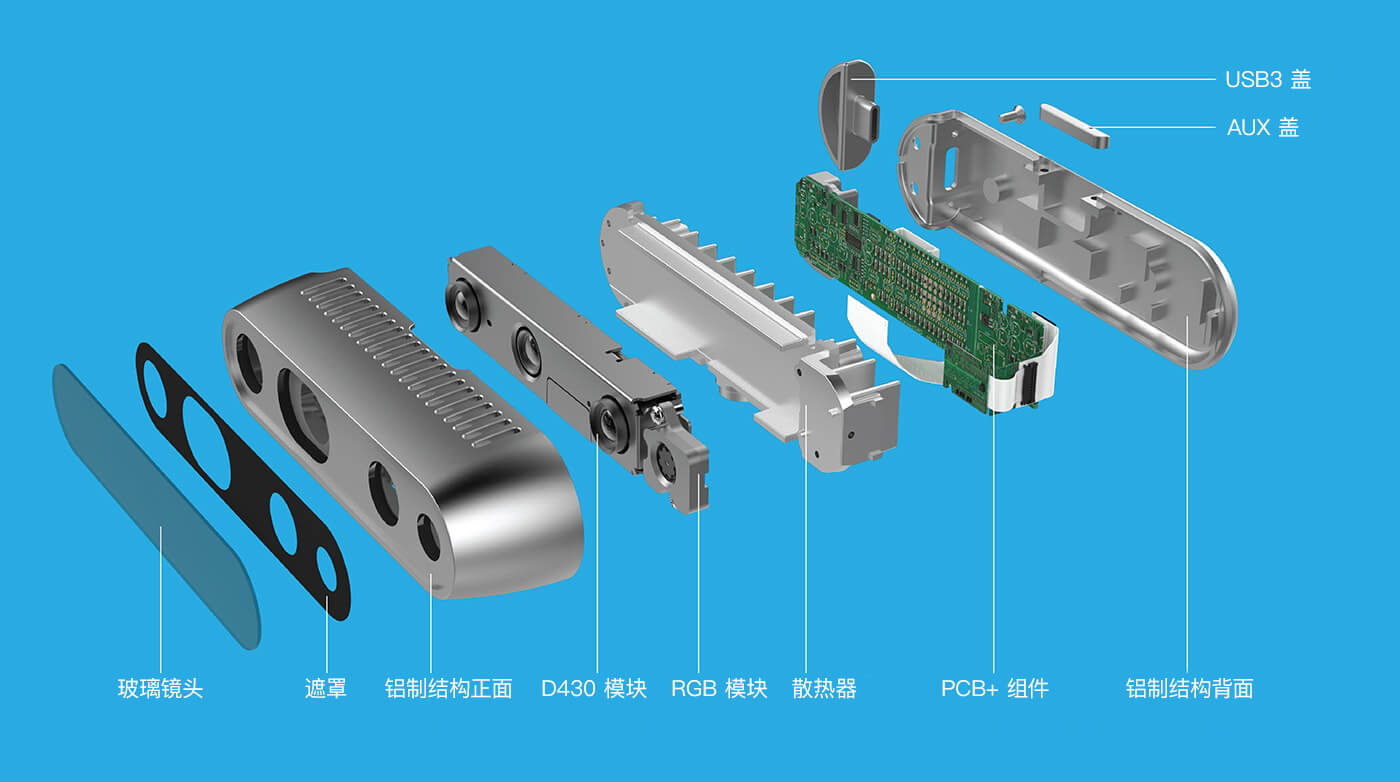
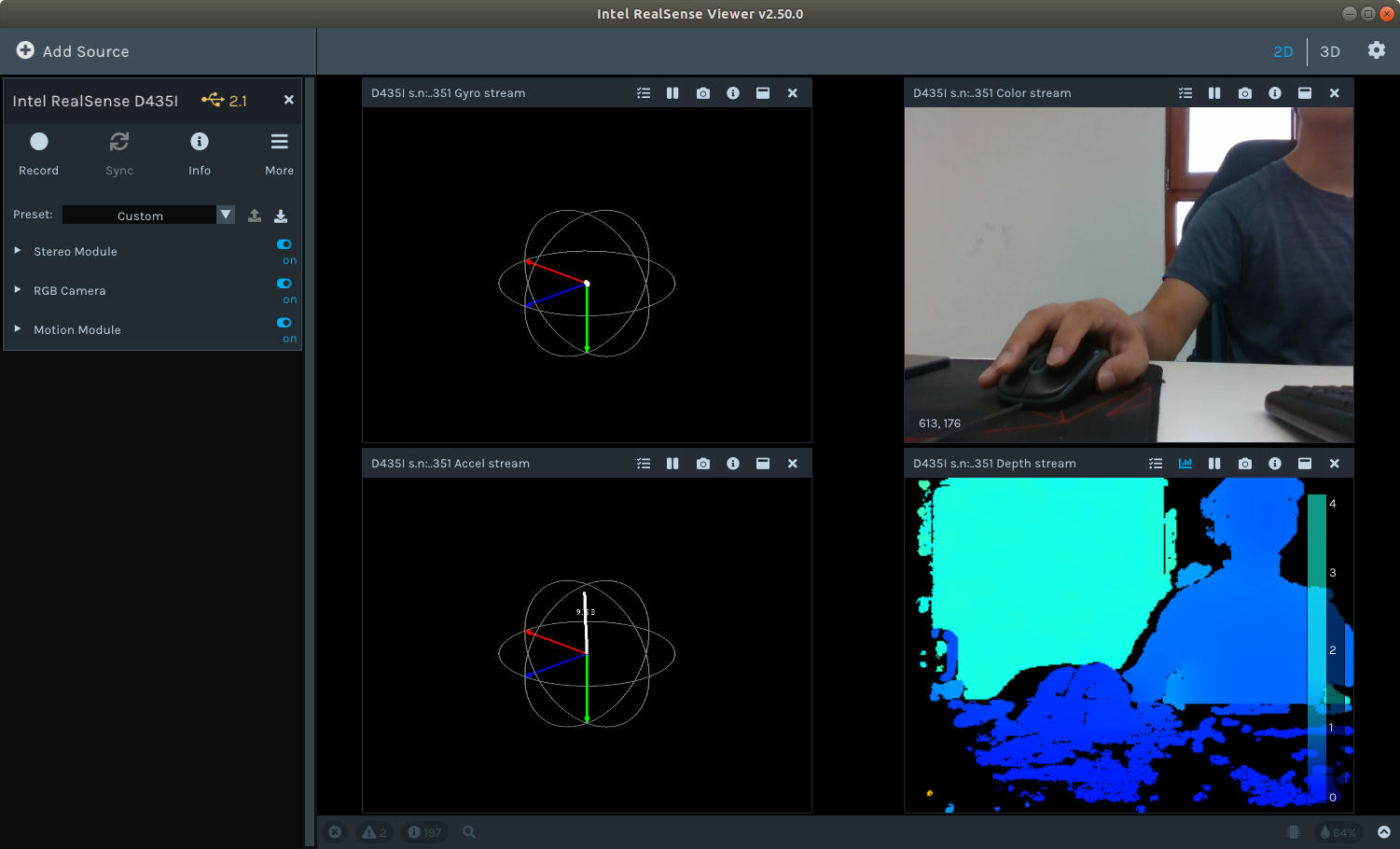
RS D435i [1]
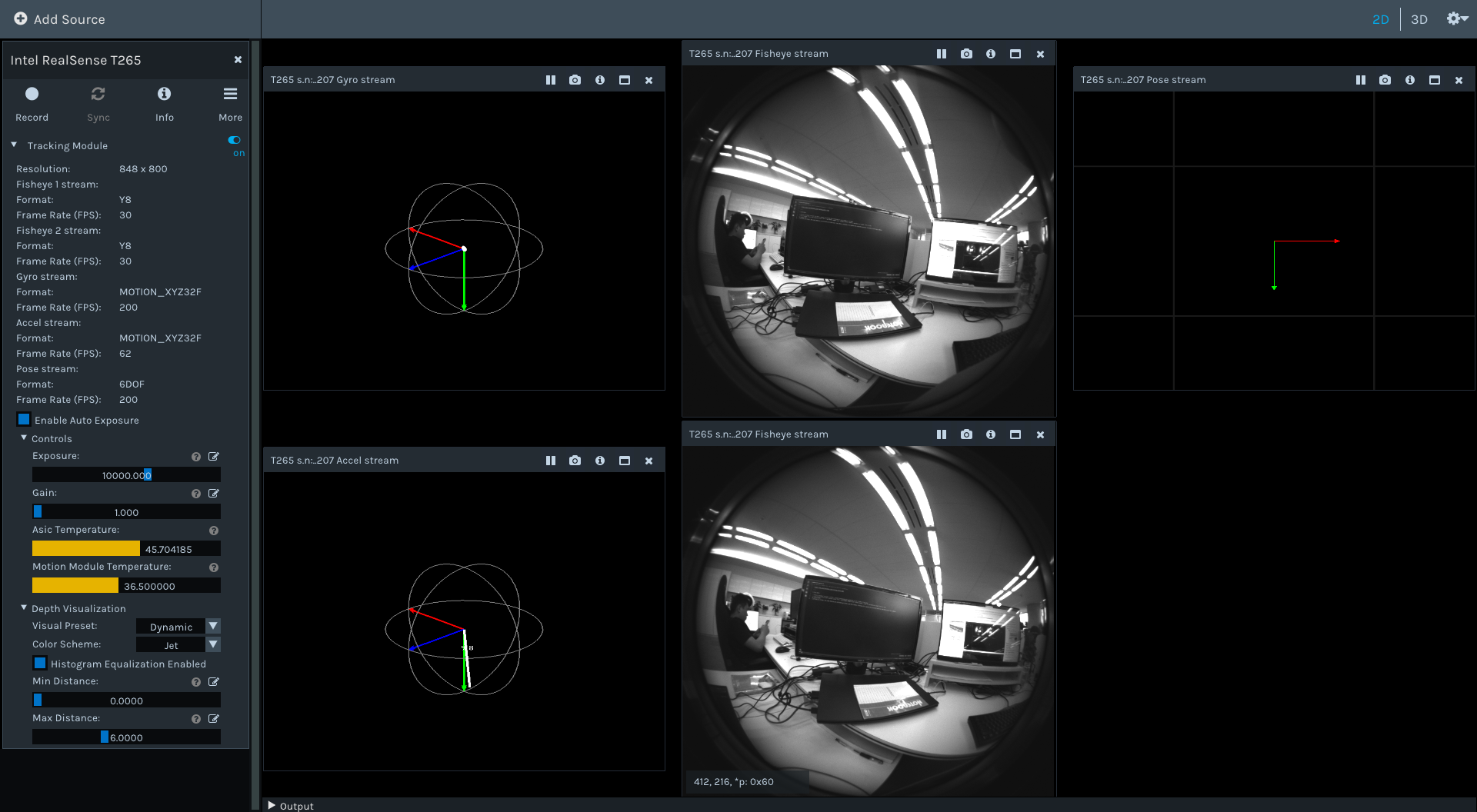
RS T265 [5]
Tech Specs
- Intel® Movidius™ Myriad™ 2.0 VPU: Visual Processing Unit optimized to run V‑SLAM at low power
- Two Fisheye lenses
- FOV: close to hemispherical 163±5° field of view
- Resolution: 840x800
- Frame Rate: 30 FPS
- Image Format: Y8
- sensor: OV9282
- BMI055 IMU
- Gyroscope
- Frame Rate: 200 FPS
- Accelerator
- Frame Rate: 62 FPS
- Gyroscope
- infrared cut filter: The T265 features an infrared cut filter over the lenses, allowing it to ignore the projected patterns from D400 series depth cameras
- pose output
- Format: 6DOF
- Frame Rate: 200 FPS
Test
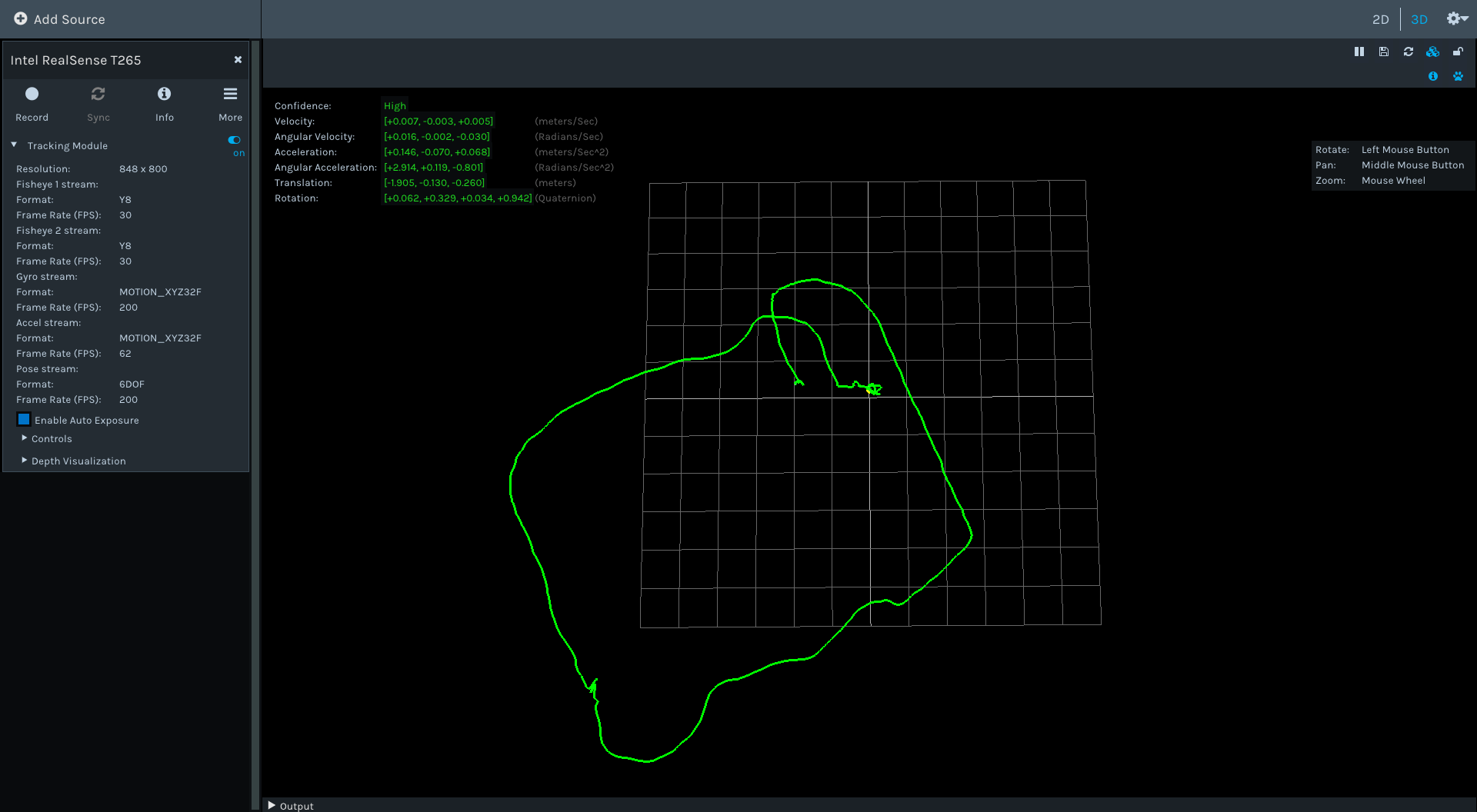
Results
- 相机前视,运行正常,回到原点

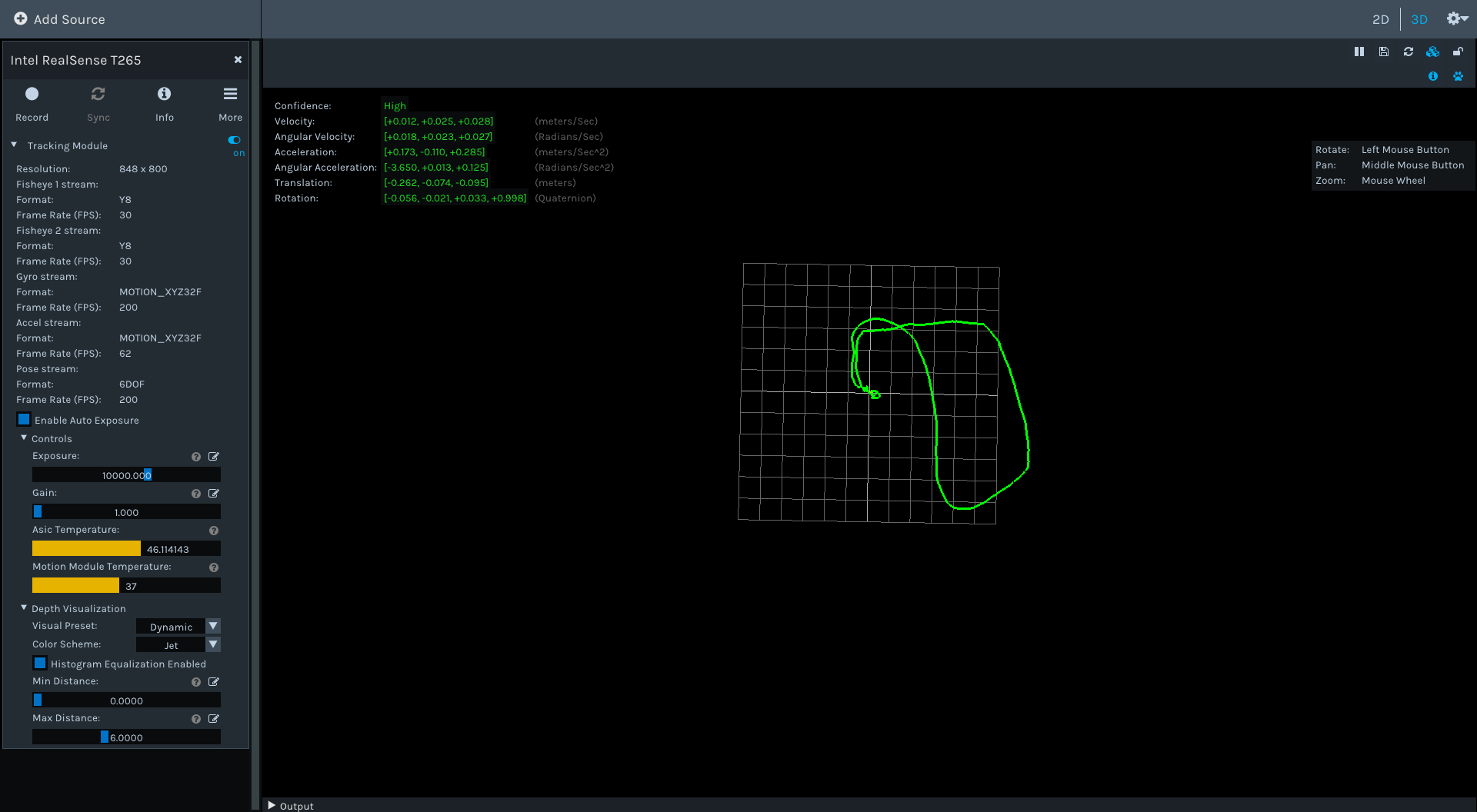
- 相机下视,运行正常,最终离原点误差 0.8m 左右
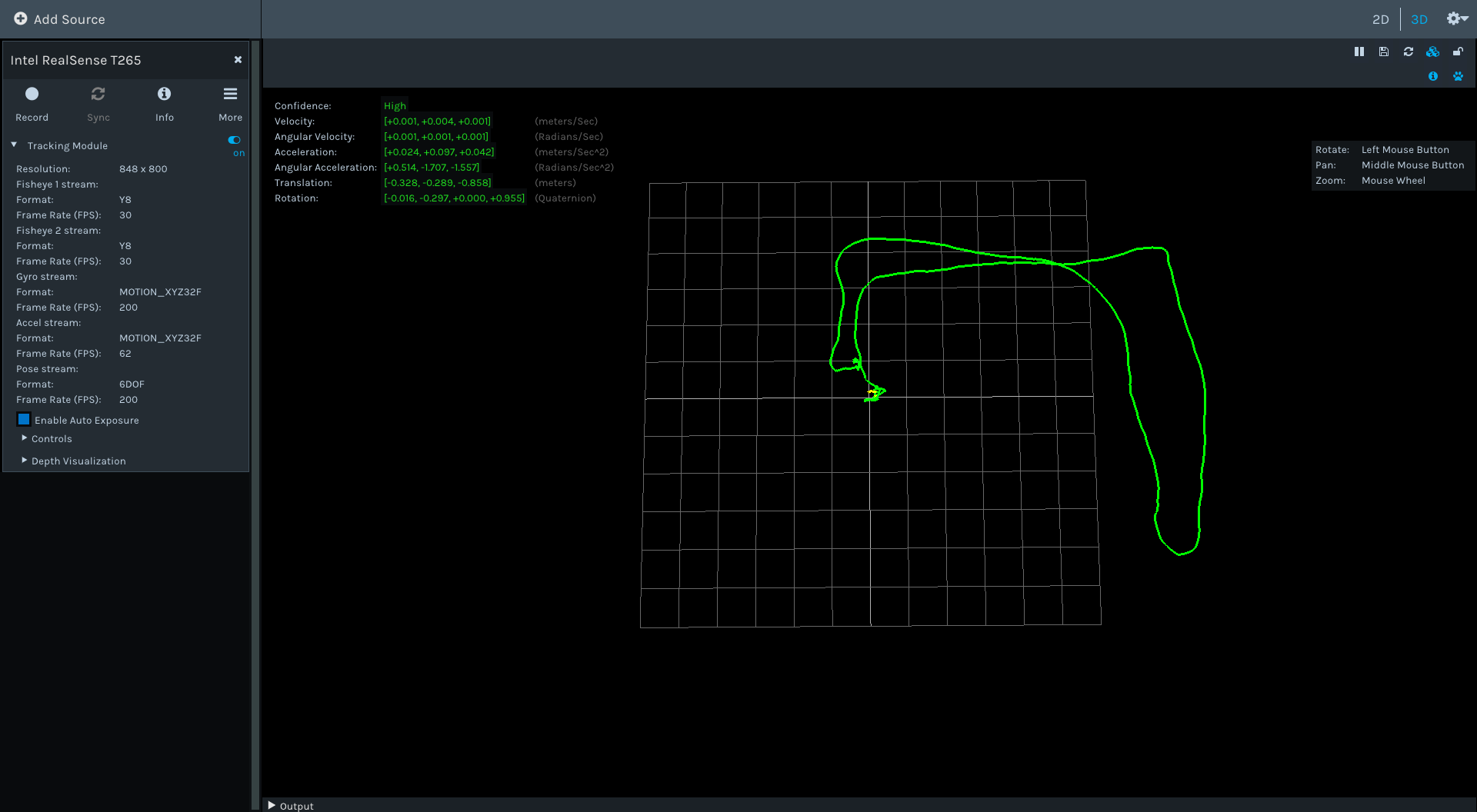
- 快速运动(某些地方来回快速挥动),正常运行,不飞,最终离原点误差 2m 左右

- 遮挡右目,正常运行,最终离原点误差 0.7m 左右
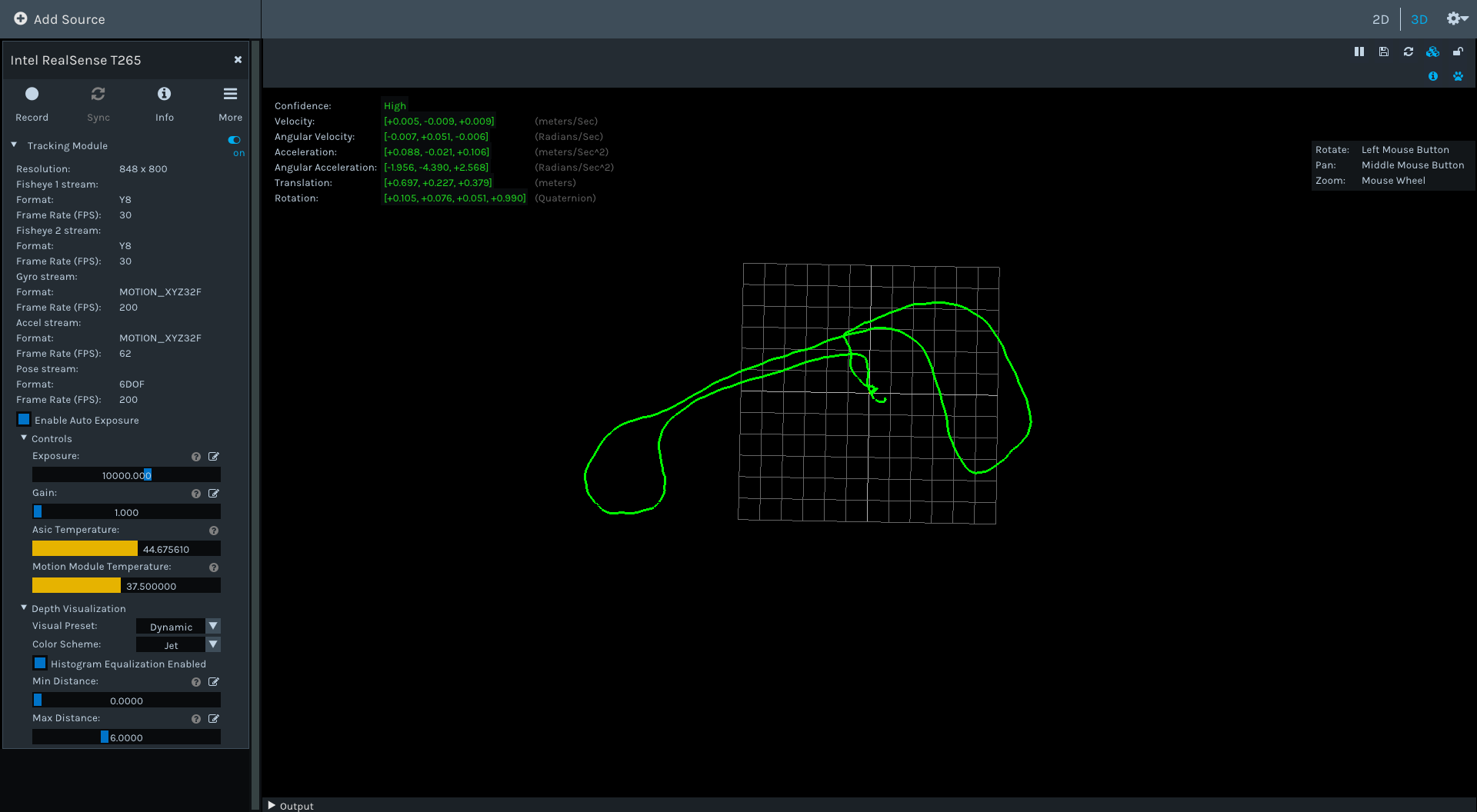
- 遮挡左目,正常运行,最终离原点误差 2m 左右
Conclusion
pros
- 相机前视,正常运动,回到原点
- 快速运动(手快速来回挥动)不会飞,不过最终到原点的误差会差些
- 相机下视(看到的都是地毯),也会正常运行,不过最终到原点的误差会差些
- 遮挡任一相机(单目状态),也会正常运行,不过最终到原点的误差会差些
cons
- 回环检测(貌似没有,待确定)
- 运行中静止一段时间,有时SLAM挂掉
- SLAM挂掉后有时需要重新插拔T265后才能正常启动
RS ZR300 [6]
Reference
Intel RealSense Cameras: D435i, T265, ZR300
https://cgabc.xyz/posts/d468fb33/