双目立体视觉原理
Last updated on March 2, 2026 pm
[TOC]
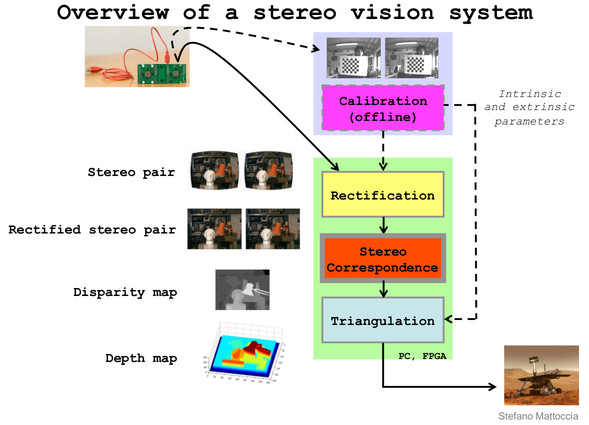
Overview
双目立体视觉的整体流程包括:
- 图像采集
- 双目标定
- 双目矫正
- 立体匹配
- 三维重建
1. 图像采集
双目相机采集 左右目图像
2. 双目标定
通过 双目标定工具 对双目相机进行标定,得到如下结果参数:
| 内参 | 外参 |
|---|---|
| 相机矩阵 \(K_1, K_2\) | 旋转矩阵 \(R\) |
| 畸变系数 \(D_1, D_2\) | 平移向量 \(t\) |
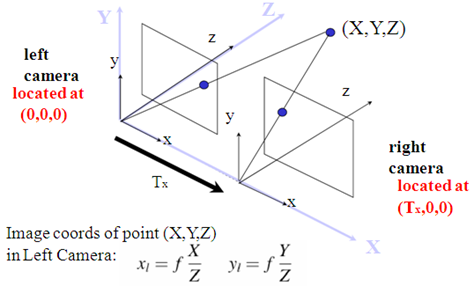
《Learning OpenCV》中对于 Translation 和 Rotation 的图示是这样的:

示例代码:
1 | |
3. 双目矫正
双目矫正 主要包括两方面:畸变矫正 和 立体矫正 。
利用 OpenCV的函数,主要分为
- stereoRectify
- initUndistortRectifyMap
- remap
stereoRectify
根据双目标定的结果 \(K_1, K_2, D_1, D_2, R, t\),利用 OpenCV函数 stereoRectify,计算得到如下参数
- 左目 矫正矩阵(旋转矩阵) \(R_1\) (3x3)
- 右目 矫正矩阵(旋转矩阵) \(R_2\) (3x3)
- 左目 投影矩阵 \(P_1\) (3x4)
- 右目 投影矩阵 \(P_2\) (3x4)
- disparity-to-depth 映射矩阵 \(Q\) (4x4)
其中,
左右目投影矩阵(horizontal stereo, \({c_x}_1'={c_x}_2'\) if CV_CALIB_ZERO_DISPARITY is set)
\[ P_1 = \begin{bmatrix} f' & 0 & {c_x}_1' & 0 \\ 0 & f' & c_y' & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} \]
\[ P_2 = \begin{bmatrix} f' & 0 & {c_x}_2' & t_x' \cdot f' \\ 0 & f' & c_y' & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} \]
where
\[ t_x' = -B \]
disparity-to-depth 映射矩阵
\[ Q = \begin{bmatrix} 1 & 0 & 0 & -{c_x}_1' \\ 0 & 1 & 0 & -c_y' \\ 0 & 0 & 0 & f' \\ 0 & 0 & -\frac{1}{t_x'} & \frac{ {c_x}_1'-{c_x}_2'}{t_x'} \end{bmatrix} \]
通过 \(P_2\) 可计算出 基线 长度:
\[ \begin{aligned} \text{baseline} = B = - t_x' = - \frac{ {P_2}^{(03)} }{f'} \end{aligned} \]
示例代码:
1 | |
CameraInfo DKRP
参考:sensor_msgs/CameraInfo Message
- D: distortion parameters.
- For "plumb_bob", the 5 parameters are: (k1, k2, t1, t2, k3)
- K: Intrinsic camera matrix for the raw (distorted) images.
- Projects 3D points in the camera coordinate frame to 2D pixel coordinates using the focal lengths (fx, fy) and principal point (cx, cy). \[ \mathbf{K} = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \]
- R: Rectification matrix (stereo cameras only).
- A rotation matrix aligning the camera coordinate system to the ideal stereo image plane so that epipolar lines in both stereo images are parallel.
- For monocular cameras \(\mathbf{R} = \mathbf{I}\)
- P: Projection/camera matrix.
- For monocular cameras \[ \mathbf{P} = \begin{bmatrix} f_x & 0 & c_x & 0 \\ 0 & f_y & c_y & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} \]
- For a stereo pair, the fourth column [Tx Ty 0]' is related to the position of the optical center of the second camera in the first camera's frame. We assume Tz = 0 so both cameras are in the same stereo image plane.
- The first camera \[ \mathbf{P} = \begin{bmatrix} f_x' & 0 & c_x' & 0 \\ 0 & f_y' & c_y' & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} \]
- The second camera \[ \mathbf{P} = \begin{bmatrix} f_x' & 0 & c_x' & -f_x' \cdot B \\ 0 & f_y' & c_y' & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} \]
- Given a 3D point \([X Y Z]'\), the projection \((x, y)\) of the point onto the rectified image is given by:
initUndistortRectifyMap
左右目 分别利用 OpenCV函数 initUndistortRectifyMap 计算 the undistortion and rectification transformation map,得到
- 左目map: \(map^l_1, map^l_2\)
- 右目map: \(map^r_1, map^r_2\)
示例代码:
1 | |
Remap
左右目 分别利用 OpenCV函数 remap 并根据 左右目map 对左右目图像进行 去畸变 和 立体矫正,得到 左右目矫正图像
示例代码:
1 | |
4. 立体匹配
根据双目矫正图像,通过 BM或SGM等立体匹配算法 对其进行立体匹配,计算 视差图
视差计算
通过 OpenCV函数 stereoBM (block matching algorithm),生成 视差图(Disparity Map) (CV_16S or CV_32F)
disparity map from stereoBM of OpenCV : It has the same size as the input images. When disptype == CV_16S, the map is a 16-bit signed single-channel image, containing disparity values scaled by 16. To get the true disparity values from such fixed-point representation, you will need to divide each disp element by 16. If disptype == CV_32F, the disparity map will already contain the real disparity values on output.
So if you've chosen disptype = CV_16S during computation, you can access a pixel at pixel-position (X,Y) by: short pixVal = disparity.at<short>(Y,X);, while the disparity value is float disparity = pixVal / 16.0f;; if you've chosen disptype = CV_32F during computation, you can access the disparity directly: float disparity = disparity.at<float>(Y,X);
5. 深度图
一般双目相机
(1)算法1:根据视差图,利用 \(f'\) 和 \(B\) 通过几何关系计算 深度值,并利用相机内参计算 三维坐标
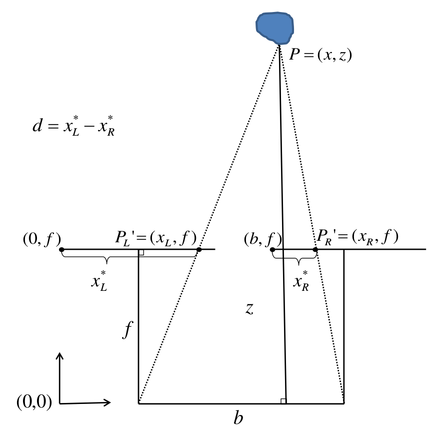
根据上图相似三角形关系,得
\[ \frac{Z}{B} = \frac{Z-f}{B-d_w} \quad \Longrightarrow \quad Z = \frac{Bf}{d_w} \]
其中,\(f\) 和 \(d_w\) 分别为 成像平面的焦距和视差,单位均为 物理单位,将其转换为 像素单位,上式写为
\[ Z = \frac{B f'}{d_p} \]
其中,
\[ d_p = (O_r - u_r) + (u_l - O_l) = (u_l - u_r) + (O_r - O_l) \]
最终,深度计算公式如下,通过遍历图像可生成 深度图
\[ Z = \text{depth} = \frac{B \cdot f'}{d_p} \quad \text{with} \quad d_p = \text{disp}(u,v) + ({c_x}_2' - {c_x}_1') \]
根据 小孔成像模型,已知 \(Z\) 和 相机内参 可计算出 三维点坐标,从而可生成 三维点云
\[ \begin{aligned} \begin{cases} Z = \text{depth} = \frac{f' \cdot B}{d_p} \\ X = \frac{u-{c_x}_1'}{f'} \cdot Z \\ Y = \frac{v-{c_y}'}{f'} \cdot Z \end{cases} \end{aligned} \quad \text{or} \quad \begin{aligned} \begin{cases} \text{bd} = \frac{B}{d_p}\\ Z = \text{depth} = f' \cdot \text{bd} \\ X = (u-{c_x}_1') \cdot \text{bd} \\ Y = (v-{c_y}') \cdot \text{bd} \end{cases} \end{aligned} \]
其中,\(\text{disp}(u,v)\) 代表 视差图 坐标值
(2)算法2:根据视差图,利用 \(Q\) 矩阵 计算 三维点坐标(reprojectImageTo3D)
\[ \begin{bmatrix} X' \\ Y' \\ Z' \\ W \end{bmatrix} = Q \cdot \begin{bmatrix} u \\ v \\ \text{disp}(u,v) \\ 1 \end{bmatrix} \]
最终,三维点坐标为
\[ \begin{bmatrix} X \\ Y \\ Z \end{bmatrix} = \begin{bmatrix} \frac{X'}{W} \\[2ex] \frac{Y'}{W} \\[2ex] \frac{Z'}{W} \end{bmatrix} \]
单目结构光相机(Kinect v1)
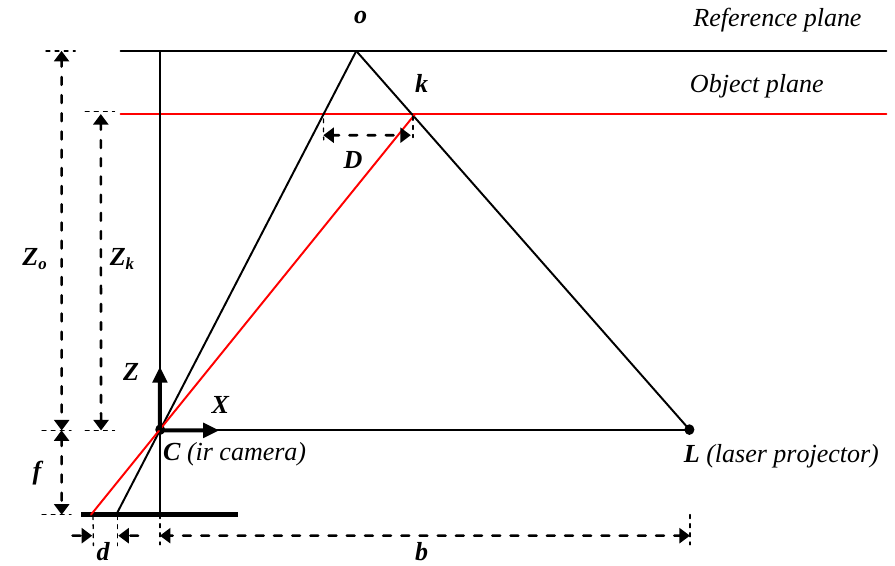
根据 相似三角形
\[ \frac{D}{b}=\frac{Z_{o}-Z_{k}}{Z_{o}} \]
\[ \frac{d}{f}=\frac{D}{Z_{k}} \]
最终,得
\[ Z_{k}=\frac{Z_{o}}{1+\frac{Z_{o}}{f b} d} \]
深度图 图像类型
- 单位meter --> 32FC1
- 单位millimeter --> 16UC1
6. 图像配准
深度图与RGB图像的配准

总结
