Ubuntu 16.04 下 VINS-Mono 的安装和使用(RealSense ZR300)
Last updated on March 2, 2026 pm
[TOC]
Overview
本文介绍在 Ubuntu 16.04(ROS Kinetic)的PC平台上使用 RealSense ZR300 的 fisheye camera (FOV: 100x133) + IMU 运行 我对VINS-Mono的改版 cggos/vins_mono_cg。
安装&运行 ZR300驱动
RealSense ZR300 的加速度计和陀螺仪的时间戳不是完全相同的(加速度计的频率为250Hz而陀螺仪的频率为200Hz),但是由于RealSense ZR300的时间戳是在硬件上打的,不是操作系统接收到到图像和IMU的时间戳,所以可以通过 插值 的方式使它们的时间戳对齐。
这里使用 maplab 推荐的驱动:ethz-asl 的 maplab_realsense,对IMU的陀螺仪、加速度计、图像的时间戳做了对齐处理。
安装 librealsense
1
sudo apt install ros-${ROS_VERSION}-librealsense安装 maplab_realsense
1
2
3
4
5
6
7
8mkdir -p ws_realsense/src
cd ws_realsense/src
git clone https://github.com/ethz-asl/maplab_realsense.git
wstool init
wstool merge maplab_realsense/dependencies.rosinstall
wstool update -j4
cd ../
catkin build运行 maplab_realsense
1
2source devel/setup.bash
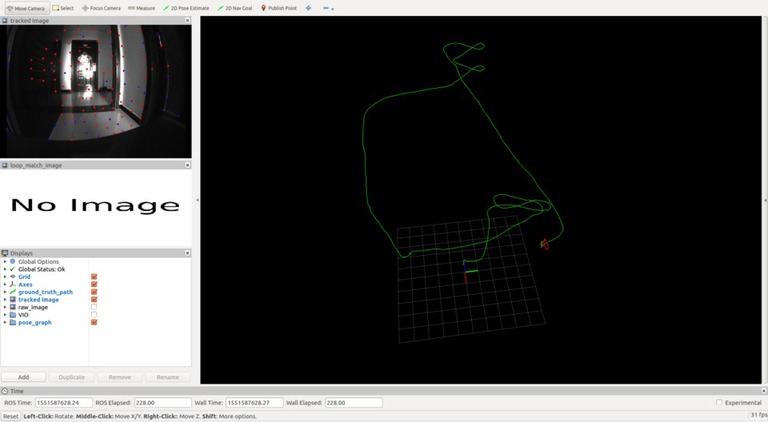
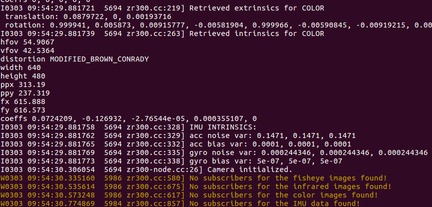
roslaunch maplab_realsense maplab_realsense.launch正常运行界面如下:
注意:若运行错误,可尝试运行多次,或者 更换尝试更换USB口。
其 Topic list:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53/rosout
/rosout_agg
/tf_static
/zr300_node/color/camera_info
/zr300_node/color/image_raw
/zr300_node/color/image_raw/compressed
/zr300_node/color/image_raw/compressed/parameter_descriptions
/zr300_node/color/image_raw/compressed/parameter_updates
/zr300_node/color/image_raw/compressedDepth
/zr300_node/color/image_raw/compressedDepth/parameter_descriptions
/zr300_node/color/image_raw/compressedDepth/parameter_updates
/zr300_node/color/image_raw/theora
/zr300_node/color/image_raw/theora/parameter_descriptions
/zr300_node/color/image_raw/theora/parameter_updates
/zr300_node/depth/camera_info
/zr300_node/device_time
/zr300_node/device_time/parameter_descriptions
/zr300_node/device_time/parameter_updates
/zr300_node/fisheye/camera_info
/zr300_node/fisheye/image_raw
/zr300_node/fisheye/image_raw/compressed
/zr300_node/fisheye/image_raw/compressed/parameter_descriptions
/zr300_node/fisheye/image_raw/compressed/parameter_updates
/zr300_node/fisheye/image_raw/compressedDepth
/zr300_node/fisheye/image_raw/compressedDepth/parameter_descriptions
/zr300_node/fisheye/image_raw/compressedDepth/parameter_updates
/zr300_node/fisheye/image_raw/theora
/zr300_node/fisheye/image_raw/theora/parameter_descriptions
/zr300_node/fisheye/image_raw/theora/parameter_updates
/zr300_node/imu
/zr300_node/ir_1/camera_info
/zr300_node/ir_1/image_raw
/zr300_node/ir_1/image_raw/compressed
/zr300_node/ir_1/image_raw/compressed/parameter_descriptions
/zr300_node/ir_1/image_raw/compressed/parameter_updates
/zr300_node/ir_1/image_raw/compressedDepth
/zr300_node/ir_1/image_raw/compressedDepth/parameter_descriptions
/zr300_node/ir_1/image_raw/compressedDepth/parameter_updates
/zr300_node/ir_1/image_raw/theora
/zr300_node/ir_1/image_raw/theora/parameter_descriptions
/zr300_node/ir_1/image_raw/theora/parameter_updates
/zr300_node/ir_2/camera_info
/zr300_node/ir_2/image_raw
/zr300_node/ir_2/image_raw/compressed
/zr300_node/ir_2/image_raw/compressed/parameter_descriptions
/zr300_node/ir_2/image_raw/compressed/parameter_updates
/zr300_node/ir_2/image_raw/compressedDepth
/zr300_node/ir_2/image_raw/compressedDepth/parameter_descriptions
/zr300_node/ir_2/image_raw/compressedDepth/parameter_updates
/zr300_node/ir_2/image_raw/theora
/zr300_node/ir_2/image_raw/theora/parameter_descriptions
/zr300_node/ir_2/image_raw/theora/parameter_updates
/zr300_node/pointcloud
标定 ZR300
使用 kalibr 对 ZR300 进行标定,标定方法可参考 Kalibr 之 Camera-IMU 标定 (总结)。
安装&运行 VINS-Mono
这里使用 我对VINS-Mono的改版 cggos/vins_mono_cg,配置文件或者标定参数均使用VINS-Mono默认文件。
安装 Dependencies
- eigen3
- ceres-solver
安装 vins_mono_cg
1
2
3
4
5mkdir -p ws_vins/src
cd ws_vins/src
git clone https://github.com/cggos/vins_mono_cg.git
cd ../
catkin_make -j3修改 config/realsense/realsense_fisheye_config.yaml
1
2
3imu_topic: "/zr300_node/imu"
image_topic: "/zr300_node/fisheye/image_raw"
output_path: "./output/"运行 vins_mono_cg
1
roslaunch vins_estimator realsense_fisheye.launch