Linear Algebra in a Nutshell
Last updated on March 2, 2026 pm
Matrix
厄米特矩阵
埃尔米特矩阵等于自己的 共轭转置
- 厄米特矩阵 \(A^H = A\)
- 实对称矩阵 \(A^T = A\)
- 反厄米特矩阵 \(A^H = -A\)
- 实反对称矩阵 \(A^T = -A\)
正规矩阵
\[ A^H A = A A^H \]
- 酉矩阵 \(A^H A = A A^H = I\)
- 正交矩阵 \(A^T A = AA^T = I\)
- 特殊正交矩阵:\(\det(A) = +1\),是一个旋转矩阵
- Givens矩阵:\(G(i,j,\theta)\)
- 瑕旋转矩阵:\(\det(A) = -1\),瑕旋转是旋转加上镜射
- Householder矩阵:\(H = I - 2 uu^T\)
- 特殊正交矩阵:\(\det(A) = +1\),是一个旋转矩阵
- 正交矩阵 \(A^T A = AA^T = I\)
正定与半正定矩阵
在线性代数里,正定矩阵(positive definite matrix)有时简称为 正定阵。
对任意的非零向量 \(\boldsymbol{x}\) 恒有 二次型
\[ f = \boldsymbol{x}^T \boldsymbol{A} \boldsymbol{x} > 0 \]
则称 \(f\) 为 正定二次型,对应的矩阵为 正定矩阵;若 \(f \ge 0\),则 对应的矩阵为 半正定矩阵。
直观理解
令 \(Y=MX\),则 \(X^T Y > 0\),所以
\[ cos(\theta) = \frac{X^T Y}{\|X\|\|Y\|} > 0 \]
因此,从另一个角度,正定矩阵代表一个向量经过它的变化后的向量与其本身的夹角 小于90度
判别对称矩阵A的正定性
- 求出A的所有特征值
- 若A的特征值均为正数,则A是正定的;若A的特征值均为负数,则A为负定的。
- 计算A的各阶顺序主子式
- 若A的各阶顺序主子式均大于零,则A是正定的;若A的各阶顺序主子式中,奇数阶主子式为负,偶数阶为正,则A为负定的。
伴随矩阵
余子式
在n阶行列式D中划去任意选定的k行、k列后,余下的元素按原来顺序组成的n-k阶行列式M,称为 行列式D的k阶子式A的余子式。
A关于第i行第j列的余子式(记作 \(M_{ij}\))是去掉A的第i行第j列之后得到的(n− 1)×(n− 1)矩阵的行列式。
代数余子式
如果k阶子式A在行列式D中的行和列的标号分别为i1,i2,…,ik和j1,j2,…,jk。则在A的余子式M前面添加符号 \((-1)^{\left(i_{1}+i_{2}+, \ldots,+i_{k}\right)+\left(j_{1}+j_{2}+, \ldots,+j_{k}\right)}\),所得到的n-k阶行列式,称为 行列式D的k阶子式A的代数余子式。
A的 (代数)余子矩阵 是一个n×n的矩阵C,使得其第i行第j列的元素是A关于第i行第j列的代数余子式:
\[ \mathbf{C}_{i j}=(-1)^{i+j} M_{i j} \]
伴随矩阵(adjoint matrix)
A的 代数余子矩阵 的 转置矩阵,也就是说, A的伴随矩阵是一个n×n的矩阵(记作adj(A)),使得其第i 行第j 列的元素是A关于第j 行第i 列的代数余子式
\[ \mathbf{A}^* = \operatorname{adj}(\mathbf{A})=\mathbf{C}^{T} \]
自伴随矩阵
\[ \mathbf{A}^* = \mathbf{A} \]
在数学里,作用于一个有限维的内积空间,一个自伴算子(self-adjoint operator)等于自己的伴随算子;等价地说,表达自伴算子的矩阵是埃尔米特矩阵。埃尔米特矩阵等于自己的共轭转置。
可逆矩阵(非奇异矩阵)
\[ \mathbf{A}^{-1} = \frac{1}{|\mathbf{A}|} \mathbf{A}^* \]
- 矩阵乘以可逆矩阵 秩不变,因为可逆矩阵可以表示为初等矩阵的乘积,而初等变换不改变矩阵的秩(左乘-行变换,右乘-列变换)
其他
对角阵:任意正规矩阵 都可以经过 正交变换 变成 对角矩阵
上(下)三角阵
矩阵变换
初等变换
初等变换只是不影响矩阵的秩,其他的特性都改变了。
对于计算矩阵的行列式,不能进行初等变换,但是可以做行列的进加减,不能乘以系数。
正交变换
Givens rotation(吉文斯旋转)
在数值线性代数中,吉文斯旋转(Givens rotation)是在两个坐标轴所展开的平面中的旋转。
吉文斯旋转 矩阵:
\[ G(i, j, \theta)=\left[\begin{array}{ccccccc} 1 & \cdots & 0 & \cdots & 0 & \cdots & 0 \\ \vdots & \ddots & \vdots & & \vdots & & \vdots \\ 0 & \cdots & c & \cdots & s & \cdots & 0 \\ \vdots & & \vdots & \ddots & \vdots & & \vdots \\ 0 & \cdots & -s & \cdots & c & \cdots & 0 \\ \vdots & & \vdots & & \vdots & \ddots & \vdots \\ 0 & \cdots & 0 & \cdots & 0 & \cdots & 1 \end{array}\right] \]
\[ G \triangleq\left[\begin{array}{cc} \cos \phi & \sin \phi \\ -\sin \phi & \cos \phi \end{array}\right] \]
当一个吉文斯旋转矩阵 \(G(i, j, \theta)\) 从左侧乘另一个矩阵 \(A\) 的时候,\(GA\) 只作用于 \(A\) 的第 \(i\) 和 \(j\) 行。
\[ \left[\begin{array}{cc} c & -s \\ s & c \end{array}\right]\left[\begin{array}{l} a \\ b \end{array}\right]=\left[\begin{array}{l} r \\ 0 \end{array}\right] \]
明确计算出 \(\theta\) 是没有必要的。我们转而直接获取 c, s 和 r。一个明显的解是
\[ \begin{aligned} &r \leftarrow \sqrt{a^{2}+b^{2}}\\ &c \leftarrow a / r\\ &s \leftarrow-b / r \end{aligned} \]
- Givens 旋转在数值线性代数中主要的用途是在向量或矩阵中介入零。例如,这种效果可用于计算矩阵的 QR分解。
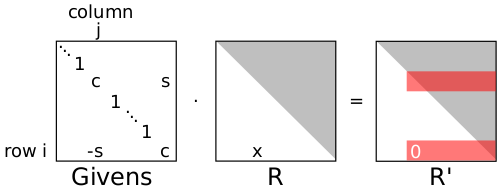
\[ G_{j_{k}} \ldots G_{j_{2}} G_{j_{1}} R_{a}=\left[\begin{array}{c} R^{\prime} \\ 0 \end{array}\right] \]
- 超过 Householder变换 的一个好处是它们可以轻易的并行化,另一个好处是对于非常稀疏的矩阵计算量更小。
1 | |
Jacobi rotation
Householder 变换
豪斯霍尔德变换(Householder transformation)或译“豪斯霍德转换”,又称初等反射(Elementary reflection),这一变换将一个向量变换为由一个超平面反射的镜像,是一种线性变换。其变换矩阵被称作豪斯霍尔德矩阵,在一般内积空间中的类比被称作豪斯霍尔德算子。超平面的法向量被称作豪斯霍尔德向量。
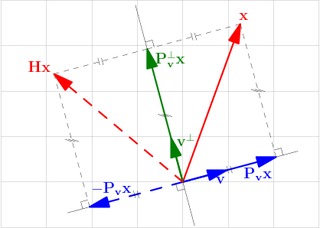
豪斯霍尔德变换可以将向量的某些元素置零,同时保持该向量的范数不变。例如,将非零列向量 \(\mathbf{x}=\left[x_{1}, \dots, x_{n}\right]^{T}\) 变换为单位基向量 \(\mathbf{e}=[1,0, \ldots, 0]^{T}\) 的豪斯霍尔德矩阵为
\[ \mathbf{H}=\mathbf{I}-\frac{2}{\langle\mathbf{v}, \mathbf{v}\rangle} \mathbf{v} \mathbf{v}^{H} \]
其中豪斯霍尔德向量 \(\mathbf{v}\) 满足:
\[ \mathbf{v}=\mathbf{x}+\operatorname{sgn}\left(\mathbf{x}_{1}\right)\|\mathbf{x}\|_{2} \mathbf{e}_{1} \]
Matrix Decomposition
EVD (Eigen Decomposition)
\[ A = VDV^{-1} \]
- \(A\) 是 方阵;\(D\) 是 对角阵,其 特征值从大到小排列;\(V\) 的列向量为 特征向量
- 若 \(A\) 为 对称阵,则 \(V\) 为 正交矩阵,其列向量为 \(A\) 的 单位正交特征向量
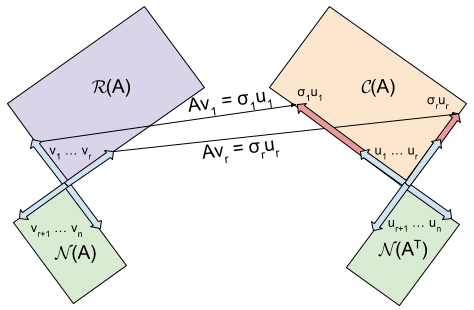
SVD (Singular Value Decomposition)
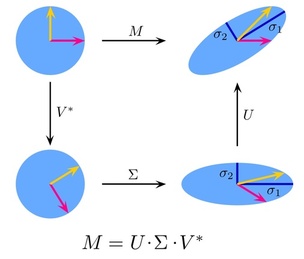
\[ A = UDV^T \]
- \(A\) 为 \(m \times n\) 的矩阵;\(D\) 是 非负对角阵,其 奇异值从大到小排列;\(U\)、\(V\) 均为 正交矩阵
SVD分解十分强大且适用,因为任意一个矩阵都可以实现SVD分解,而特征值分解只能应用于方阵。
奇异值与特征值
\[ AV = UD \Rightarrow Av_i = \sigma_{i} u_i \Rightarrow \sigma_{i} = \frac{Av_i}{u_i} \]
\[ A^T A = (V D^T U^T) (U D V^T) = V D^2 V^T \]
\[ A A^T = (U D V^T) (V D^T U^T) = U D^2 U^T \]
- \(A^T A\) 的 特征向量 组成的是SVD中的 \(V\) 矩阵
- \(A A^T\) 的 特征向量 组成的是SVD中的 \(U\) 矩阵
- \(A^T A\) 或 \(A A^T\) 的 特征值 \(\lambda_i\) 与 \(A\) 的 奇异值 \(\sigma_i\) 满足 \(\sigma_i = \sqrt{\lambda_i}\)
PCA
奇异值减少得特别快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上,可以用 最大的 \(k\) 个的奇异值和对应的左右奇异向量 来近似描述矩阵
\[ A_{m \times n} = U_{m \times m} D_{m \times n} V_{n \times n}^T \approx U_{m \times k} D_{k \times k} V_{k \times n}^T \]
LU Decomposition
\[ A = LU \]
- \(A\) 是 方阵;\(L\) 是 下三角矩阵;\(U\) 是 上三角矩阵
PLU 分解
\[ A = PLU \]
事实上,PLU 分解有很高的数值稳定性,因此实用上是很好用的工具。
LDU 分解
\[ A = LDU \]
Cholesky Decomposition
\[ A = LDL^T \]
- \(A\) 是 方阵,正定矩阵;\(L\) 是 下三角矩阵
classic:
\[ A = LL^T \\[2ex] A^{-1} = (L^T)^{-1} L^{-1} = (L^{-1})^T L^{-1} \]
LDLT
QR Decomposition
\[ A = QR \]
- \(A\) 为 \(m \times n\) 的矩阵;\(Q\) 为 酉矩阵;\(R\) 是 上三角矩阵
Four Fundamental Subspaces
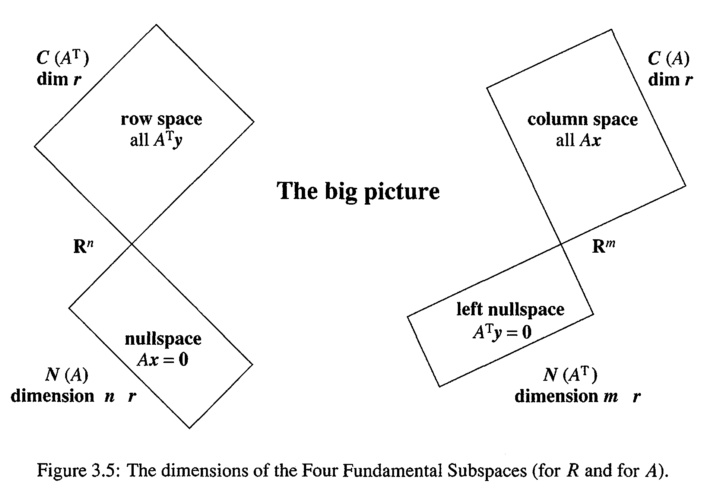
- 零空间 与 行空间 正交
- 左零空间 与 列空间 正交
column space (the range or image) \(C(A)\)
In linear algebra, the column space (also called the range or image) of a matrix A is the span (set of all possible linear combinations) of its column vectors. The column space of a matrix is the image or range of the corresponding matrix transformation.
row space \(C(A^T)\)
nullspace \(N(A)\)
\[ A x = 0 \]
The nullity of a matrix is the dimension of the null space.
The rank and nullity of a matrix A with n columns are related by the equation:
\[ \operatorname{rank}(A) + \operatorname{nullity}(A) = n \]
left nullspace \(N(A^T)\)
\[ A^T x = 0 \longrightarrow x^T A = 0 \]
左零空间 求解
已知 \[ A \in \mathbb{R}^{m \times n}, \quad \operatorname{rank}(A) = r = n, \quad m > n \]
SVD
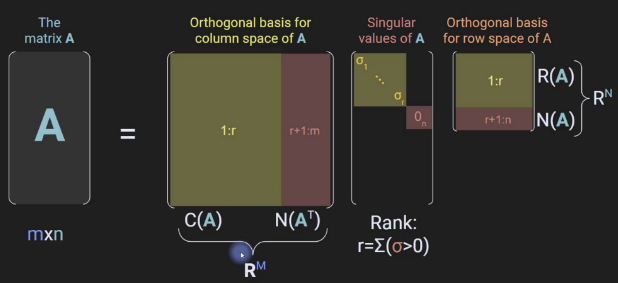
\[ \begin{aligned} A_{m \times n} &= U_{m \times m} \cdot {\Sigma}_{m \times n} \cdot V_{n \times n}^T \\ &= \left[\begin{array}{ccc|ccc} u_{1} & \cdots & u_{r} & u_{r+1} & \cdots & u_{m} \end{array}\right] \left[\begin{array}{ccc|c} \sigma_{1} & & & \\ & \ddots & & 0 \\ & & \sigma_{r} & \\ \hline & 0 & & 0 \end{array}\right] \left[\begin{array}{c} v_{1}^{T} \\ \vdots \\ v_{r}^{T} \\ \hline v_{r+1}^{T} \\ \vdots \\ v_{n}^{T} \end{array}\right] \\ &= \begin{bmatrix} {U_1}_{m \times r} & {U_2}_{m \times (m-r)} \end{bmatrix} \cdot \begin{bmatrix} {\Sigma}_r & 0 \\ 0 & 0 \end{bmatrix} \cdot \begin{bmatrix} {V_1}_{n \times r}^T \\[3pt] {V_2}_{n \times (n-r)}^T \end{bmatrix} \\ &= U_1 \cdot \Sigma_r \cdot V_1^T \\ &= \sum_{i=1}^r \sigma_i u_i v_i^T \end{aligned} \]
nullspace
\[ A \cdot V_2 = 0 \longrightarrow N(A) = V_2 \in \mathbb{R}^{n \times (n-r)} \]
left nullspace
\[ U_2^T \cdot A = 0 \longrightarrow N(A^T) = U_2 \in \mathbb{R}^{(m-r) \times m} \]
column space or the range (????)
\[ C(A) = U_1^T \in \mathbb{R}^{r \times m} \]
QR
\[ \begin{aligned} A_{m \times n} &= Q_{m \times m} \cdot R_{m \times n} \\ &= \begin{bmatrix} {Q_1}_{m \times r} & {Q_2}_{m \times (m-r)} \end{bmatrix} \begin{bmatrix} R_1 \\ 0 \end{bmatrix} \end{aligned} \]
left nullspace
\[ Q_2^T \cdot A = 0 \longrightarrow N(A^T) = Q_2 \in \mathbb{R}^{(m-r) \times m} \]
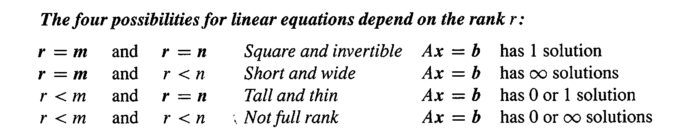
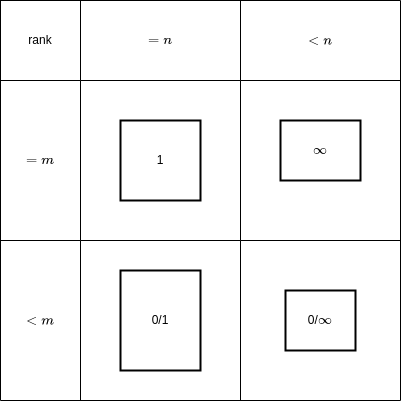
线性方程组
非齐次线性方程组
\[ A_{m \times n} x = b_{m \times 1} \]
在非齐次方程组中,A到底有没有解析解,可以由增广矩阵来判断:
- r(A) > r(A | b) 不可能,因为增广矩阵的秩大于等于系数矩阵的秩
- r(A) < r(A | b) 方程组无解;
- r(A) = r(A | b) = n,方程组有唯一解;
- r(A) = r(A | b) < n,方程组无穷解;
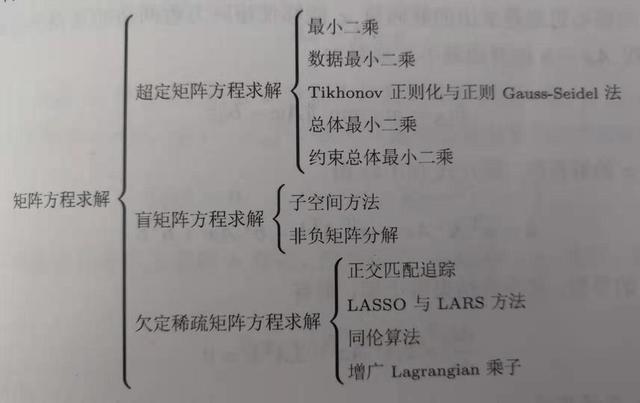
非齐次线性方程组的最小二乘问题
\[ x^* = \arg \min_x{\|Ax - b\|}_2^2 \]
m个方程求解n个未知数,有三种情况:
- m=n
- 且A为非奇异,则有唯一解 \(x=A^{-1}b\)
- m>n,超定问题(overdetermined)
- \(x=A^{+}b\)
- m<n,欠定问题(underdetermined)
齐次线性方程组
\[ A_{m \times n} x = 0 \]
齐次线性方程 解空间维数=n-r(A)
- r(A) = n
- A 是方阵,该方程组有唯一的零解
- A 不是方阵(m>n),解空间只含有零向量
- r(A) < n
- 该齐次线性方程组有非零解,而且不唯一(自由度为n-r(A))
齐次线性方程组的最小二乘问题
\[ \min{\|Ax\|}_2^2 \quad s.t. \quad \|x\| = 1 \]
- 最小二乘解为 矩阵 \(A^TA\) 最小特征值所对应的特征向量
- \(\text{EVD}(A^{T}A)=[V,D]\),找最小特征值对应的V中的特征向量
- \(\text{SVD}(A)=[U,S,V]\),找S中最小奇异值对应的V的右奇异向量
Solver
直接法
- Choleskey
- QR
迭代法
CG (Conjugate Gradient, 共轭梯度法)
PCG (Preconditioned Conjugate Gradient)
梯度下降法 vs 共轭梯度法
with Eigen
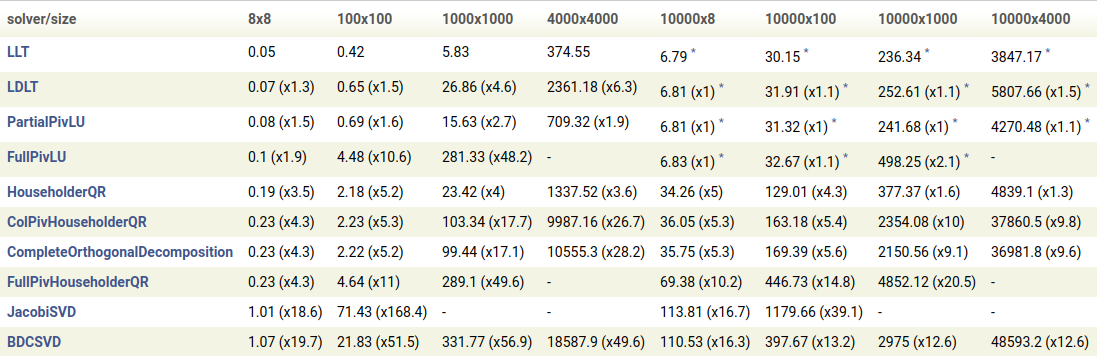
Solving linear least squares systems
- SVD decomposition (the most accurate but the slowest)
- QR decomposition
- normal equations (the fastest but least accurate)