TSDF Overview
Last updated on March 2, 2026 pm
[TOC]
Overview
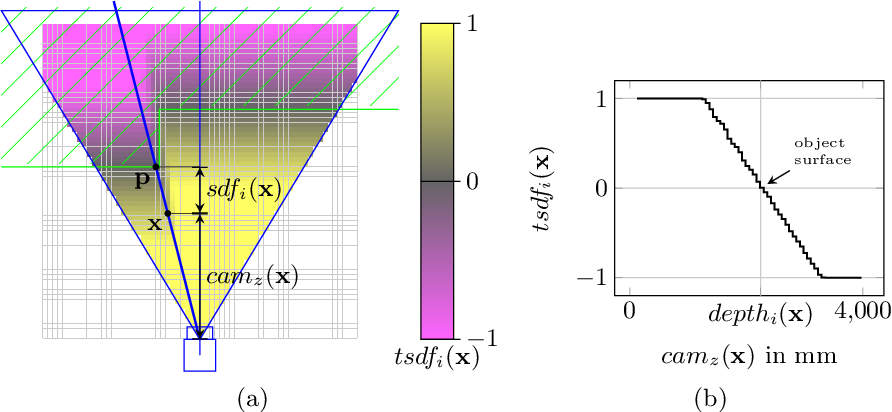
SDF (Signed Distance Function) 描述的是点到面的距离,在面上为0,在面的一边为正,另一边为负。
TSDF (Truncated SDF) 只考虑面的邻域内的SDF值,邻域的最大值是max truncation的话,则实际距离会除以max truncation这个值,达到归一化的目的,所以TSDF的值在-1到+1之间。
算法逻辑
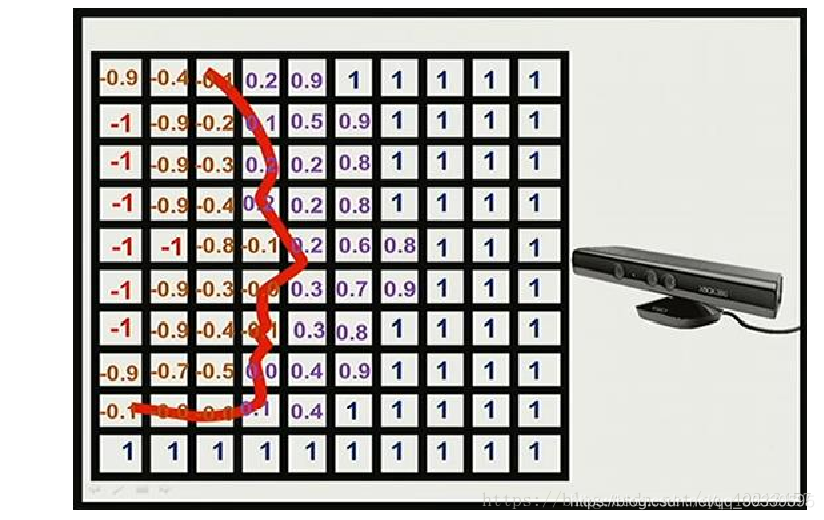
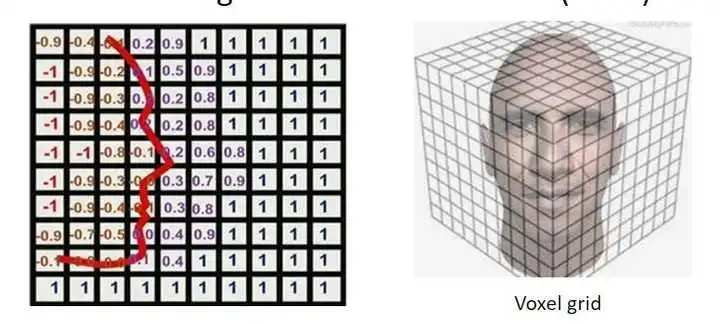
TSDF 模型将整个待重建的三维空间划分成网格,每个网格中存储了数值,网格模型中值的大小代表网格离重建好的表面的距离。
如下图表示的是重建的一个人的脸(网格模型中值为 0 的部分,红线表示重建的表面,示意图给出的二维信息,实际是三维的),重建好的表面到相机一侧都是正值,另一侧都是负值,网格点离重建好的表面距离越远绝对值越大,在网格模型中从正到负的穿越点表示重建好的场景表面。
我们将整个空间的体素全部存入GPU运算,每个线程处理一条(x,y)。即对于(x,y,z)的晶格坐标,每个GPU进程扫描处理一个(x,y)坐标下的晶格柱。
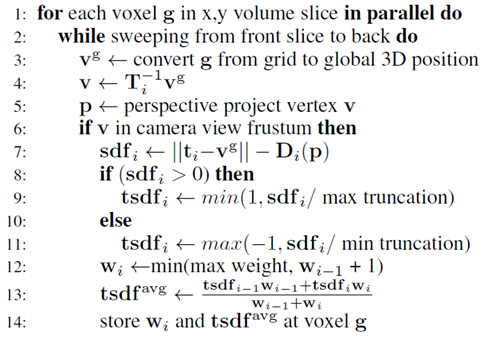
对于每个x,y坐标下的体元g,并行的从前往后扫描
将晶格坐标g转换到对应的世界坐标系点vg
对于每次TSDF操作时的拍摄变换Ti反变换到对应的相机坐标系坐标v
相机坐标系点v投影到图像坐标点p,从3D到2D
如果v在此摄像机的投影范围内,用它修正现有tsdf表示
sdfi是该相机坐标系点vg到本次相机原点ti的距离与本次观测深度Di(p)的差值
8-11为截断的过程,Truncated的意义所在,用max truncation表示选取的截断范围,此值将会关系到最后重建结果的精细程度
如果差值为正,表示该晶格在本次测量的面的后面
tsdfi赋值【0,1】之间,越靠近观测面的地方值越接近0
如果差值为负,表示该晶格在本次测量的面的前面
tsdfi赋值【-1,0】之间,越靠近观测面的地方值越接近0
选取本次计算值的tsdf的权值wi,这个权值的选取直接关系到图片的适应性,以及抗噪声的能力,其实这里有点类似卡尔曼滤波。注意这里每次权值+1的操作基于这样的原因,由于只有在相机拍摄范围内的点才会进入求tsdf的操作,每次的权值在原先的基础上增加1能照顾到迅速变化的或很少扫描到的面的变化。
加权平均求出tsdfavg
将wi和tsdfavg存储在对应的晶格,进行下个晶格的扫描操作 经过上面的扫描,最终立方体晶格中存储的tsdf值形成了重建物体外是负值,物体内部是正值,物体表面是0值得形式(可能没有准确的零值,但是可以根据正负值插值求出零值点,所以最后物体表面的分辨率将会超过晶格的分辨率)
Example: MobileFusion
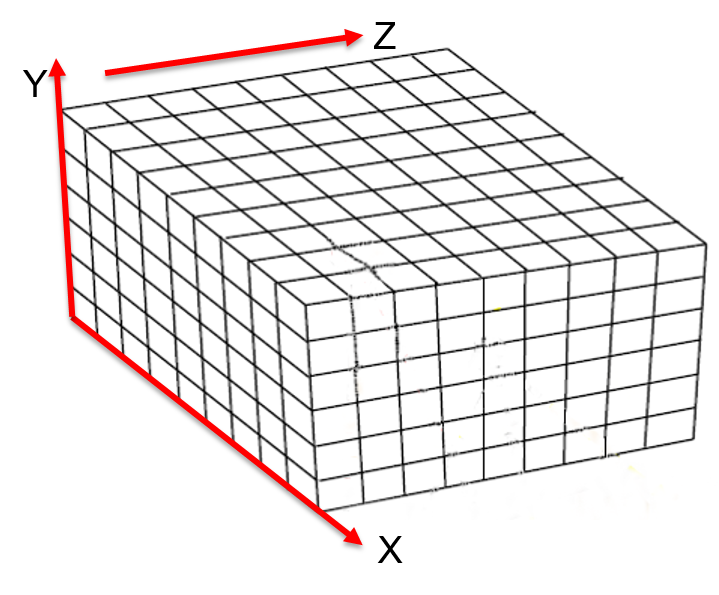
建立长方体包围盒,并划分网格
要建立一个长方体包围盒,让所有的三维点都在这个长方体里面。
假设z方向垂直相机,则x,y方向上的极值就是图像的边界。图像的边界点是就是四个角 (0,0),(w,0),(0,h),(w,h),z方向上深度范围是0~max_depth,组合而成的边界点就是(0,0,0),(0,0,max_depth),(w,0,0)等的2^3=8种情况,然后把这些点用相机的内参和外参换算到世界坐标系中,长方体的极点。
在长方体内部划分网格,比如说我们现在求得的长方体的极点分别是(-1,-1,-1),(1,1,1),单位是米。我们要在这个长方体内部划分网格,就是分割出一个个等体积的小的立方体,也就是所谓的体素。我们让体素的边长是0.02,也就是2厘米。那么从-1到1,我们可以划分出100个体素,也就是说这个长方体上每个小立方体的8个顶点的坐标可以用(x,y,z)来表示,其中x,y,z都是0-100之间的,同时它们的世界坐标也可以通过(-1+0.02x,-1+0.02y,-1+0.02*z)来计算出来。
迭代更新tsdf网格
遍历每一组数据(RGB图、深度图、pose.txt),每次把这个长方体内的所有格点的世界坐标通过逆变换到相机坐标,再投影到图片上。
将图片上对应位置的深度与格点的在相机坐标系下的深度比较
\[ \text{depth-diff} = \text{depth-val} - \text{cam-pts}[2,:] \]
如果 \(\|\text{depth-diff}\| < \text{trunc-marin}\) 则认为有效。
用 \(\text{dist} = \text{depth-diff} / \text{trunc-marin}\) 去加权更新tsdf网格。
tsdf网格每个顶点存放的是dist的加权和。
找等值面
用marching cubes算法在tsdf网格中寻找dist加权和为0的等值面,就是物体表面。
Related Projects
https://github.com/andyzeng/tsdf-fusion
https://github.com/andyzeng/tsdf-fusion-python 🚩
http://www.open3d.org/docs/0.12.0/tutorial/pipelines/rgbd_integration.html#TSDF-volume-integration