Fiducial Markers & Marker Board
Last updated on March 2, 2026 pm
[TOC]
Overview
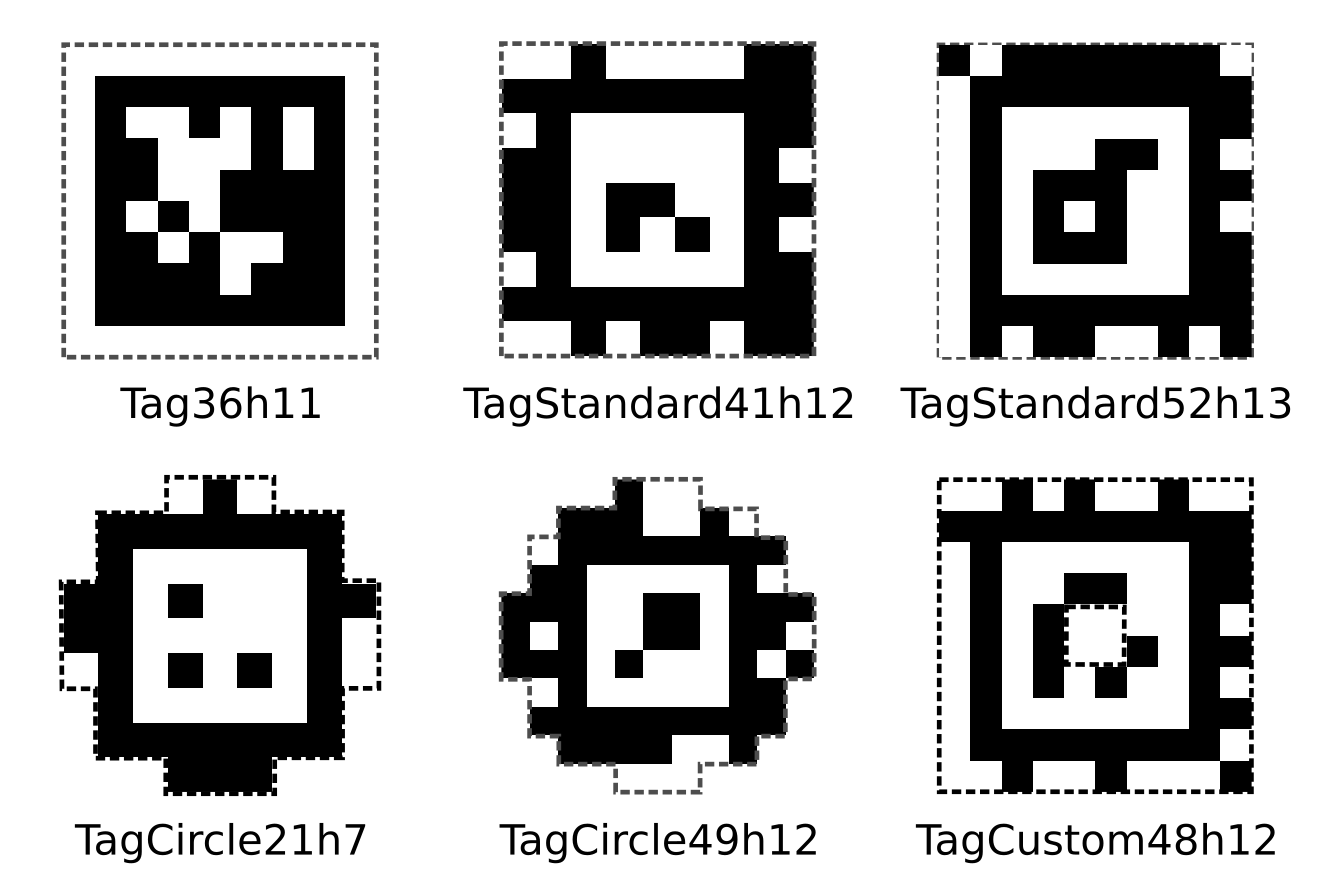
AprilTag
AprilTag is a visual fiducial system, useful for a wide variety of tasks including augmented reality, robotics, and camera calibration.
ArUco Markers
Libs
Overview

Marker
An ArUco marker is a synthetic square marker composed by a wide black border and an inner binary matrix which determines its identifier(id). The marker size determines the size of the internal matrix. For instance a marker size of 4x4 is composed by 16 bits.
Dictionary
A dictionary of markers is the set of markers that are considered in a specific application.
The main properties of a dictionary:
- The dictionary size is the number of markers that compose the dictionary.
- The marker size is the size of those markers (the number of bits).
Different dictionaries:
Predefined dictionaries (
DICT_6X6_250: an example of predefined dictionary of markers with 6x6 bits and a total of 250 markers)1
2cv::Ptr<cv::aruco::Dictionary> dictionary =
cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);Automatic dictionary generation
1
2cv::Ptr<cv::aruco::Dictionary> dictionary =
cv::aruco::generateCustomDictionary(36, 5);Manual dictionary generation
Marker Creation & Detection
Creation
1
2
3
4
5
6
7cv::Mat markerImage;
cv::Ptr<cv::aruco::Dictionary> dictionary =
cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
int id_marker = 23;
int sz_img = 200;
cv::aruco::drawMarker(dictionary, id_marker, sz_img, markerImage, 1);
cv::imwrite("marker23.png", markerImage);Marker Detection
1
2
3
4
5
6
7
8
9
10
11
12
13
14std::vector<int> markerIds;
std::vector<std::vector<cv::Point2f>> markerCorners, rejectedCandidates;
cv::Ptr<cv::aruco::DetectorParameters> parameters =
cv::aruco::DetectorParameters::create();
cv::Ptr<cv::aruco::Dictionary> dictionary =
cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
cv::aruco::detectMarkers(inputImage, dictionary,
markerCorners, markerIds, parameters, rejectedCandidates);
if(ids.size() > 0)
cv::aruco::drawDetectedMarkers(imageCopy, corners, ids);
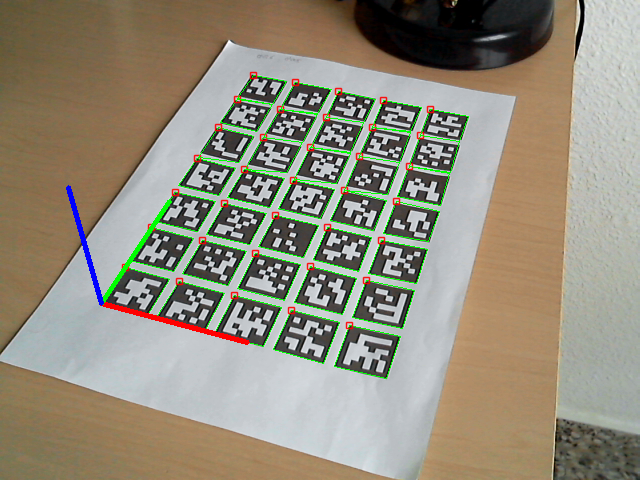
Pose Estimation of Single Marker
Pose Estimation of Single Marker
1
2
3
4
5
6
7
8
9
10double marker_length = 0.05;
std::vector<cv::Vec3d> rvecs, tvecs;
cv::aruco::estimatePoseSingleMarkers(
markerCorners, marker_length, cameraMatrix, distCoeffs, rvecs, tvecs);
for (int i = 0; i < rvecs.size(); ++i) {
auto rvec = rvecs[i];
auto tvec = tvecs[i];
cv::aruco::drawAxis(outputImage, cameraMatrix, distCoeffs, rvec, tvec, 0.1);
}
ArUco Board
Overview
The difference between a Board and a set of independent markers is that the relative position between the markers in the Board is known a priori. This allows that the corners of all the markers can be used for estimating the pose of the camera respect to the whole Board.
1 | |
Board Creation
Creation
1
2
3
4
5cv::Ptr<cv::aruco::GridBoard> board =
cv::aruco::GridBoard::create(5, 7, 0.04, 0.01, dictionary);
cv::Mat boardImage;
board->draw( cv::Size(600, 500), boardImage, 10, 1 );
Board Detection & Pose Estimation
Board Detection & Pose Estimation
1
2
3
4
5
6
7
8
9
10
11cv::Ptr<cv::aruco::Board> board = cv::aruco::Board::create();
std::vector<int> markerIds;
std::vector<std::vector<cv::Point2f>> markerCorners;
cv::aruco::detectMarkers(inputImage, board.dictionary, markerCorners, markerIds);
if(markerIds.size() > 0) {
cv::Vec3d rvec, tvec;
int valid = cv::aruco::estimatePoseBoard(
markerCorners, markerIds, board, cameraMatrix, distCoeffs, rvec, tvec);
}
ChArUco Board
Overview
ArUco markers and boards are very useful due to their fast detection and their versatility. However, one of the problems of ArUco markers is that the accuracy of their corner positions is not too high, even after applying subpixel refinement.
On the contrary, the corners of chessboard patterns can be refined more accurately since each corner is surrounded by two black squares. However, finding a chessboard pattern is not as versatile as finding an ArUco board: it has to be completely visible and occlusions are not permitted.
The ArUco part is used to interpolate the position of the chessboard corners, so that it has the versatility of marker boards, since it allows occlusions or partial views. Moreover, since the interpolated corners belong to a chessboard, they are very accurate in terms of subpixel accuracy.
When high precision is necessary, such as in camera calibration, Charuco boards are a better option than standard Aruco boards.

Board Creation
Creation
1
2
3
4
5cv::aruco::CharucoBoard board =
cv::aruco::CharucoBoard::create(5, 7, 0.04, 0.02, dictionary);
cv::Mat boardImage;
board.draw(cv::Size(600, 500), boardImage, 10, 1);
Board Detection & Pose Estimation
Board Detection
1
2
3
4cv::aruco::detectMarkers(inputImage, board.dictionary, markerCorners, markerIds);
cv::aruco::interpolateCornersCharuco(markerCorners, markerIds, image, board, charucoCorners, charucoIds);
cv::aruco::drawDetectedCornersCharuco(imageCopy, charucoCorners, charucoIds, cv::Scalar(255, 0, 0));Pose Estimation
1
2cv::aruco::estimatePoseCharucoBoard(charucoCorners, charucoIds,
board, cameraMatrix, distCoeffs, rvec, tvec);