RTAB-Map 学习笔记
Last updated on March 2, 2026 pm
version: 0.11.13-kinetic
RTAB-Map (Real-Time Appearance-Based Mapping) is a RGB-D, Stereo and Lidar Graph-Based SLAM approach based on an incremental appearance-based loop closure detector.
[TOC]
概述
RTAB-Map (Real-Time Appearance-Based Mapping) is a RGB-D Graph-Based SLAM approach based on an incremental appearance-based loop closure detector.
The loop closure detector uses a bag-of-words approach to determinate how likely a new image comes from a previous location or a new location. When a loop closure hypothesis is accepted, a new constraint is added to the map’s graph, then a graph optimizer minimizes the errors in the map.
A memory management approach is used to limit the number of locations used for loop closure detection and graph optimization, so that real-time constraints on large-scale environnements are always respected.
RTAB-Map can be used alone with a handheld Kinect or stereo camera for 6DoF RGB-D mapping, or on a robot equipped with a laser rangefinder for 3DoF mapping.
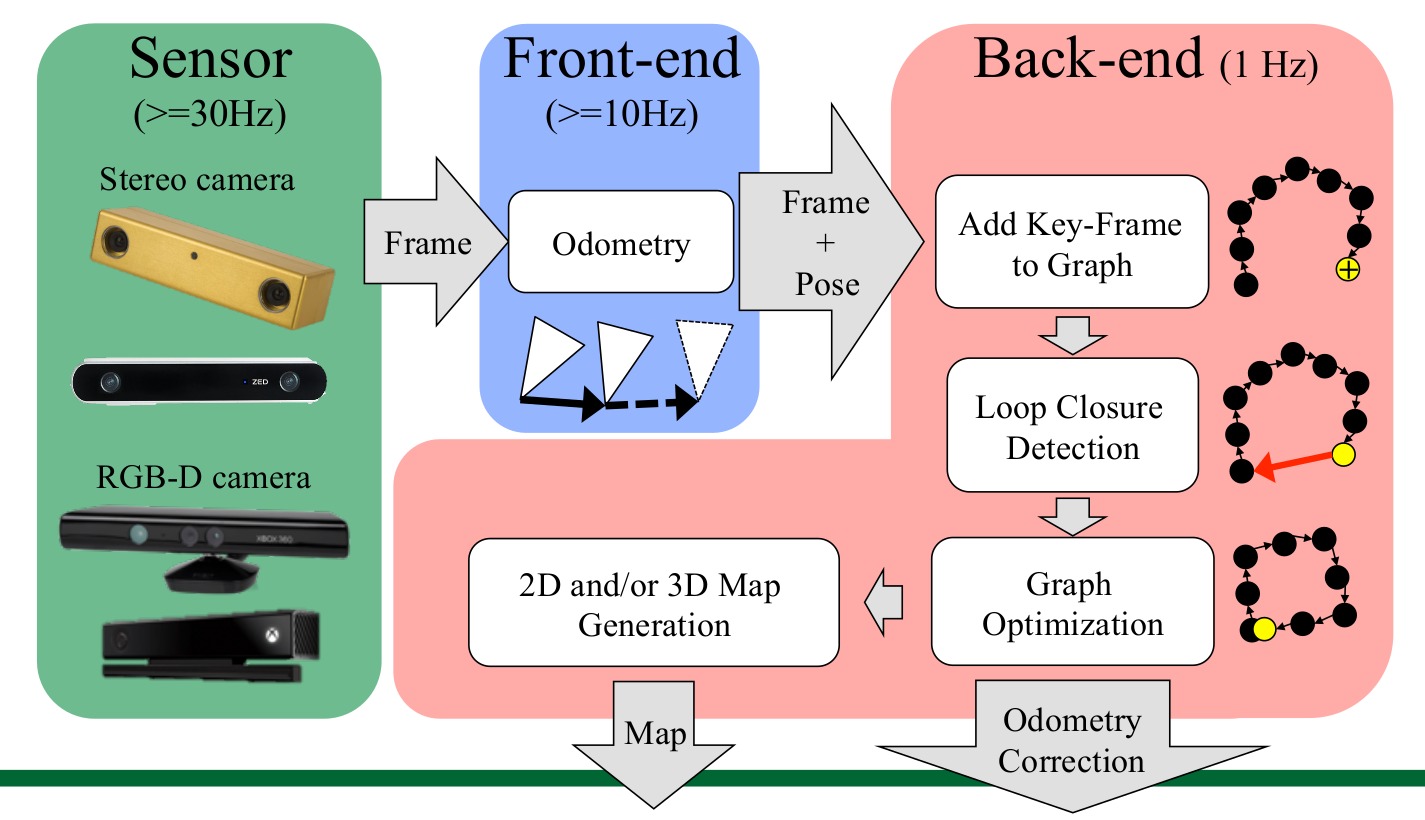
Sensors
- Stereo Camera: Bumblebee2, ZED camera, etc.
- RGB-D Camera: Kinect, RealSense, etc.
Front-end
Back-end
Add Key-Frame to Graph
Loop Closure Detection
Graph Optimization
Map(2D/3D) Generation
Demo Robot Mapping
- Command
1 | |
- Node Graph

Nodes
/rtabmap/rtabmap
- 流程图
digraph g { rankdir = LR;
subgraph cluster0{
label="Parameters";
parameters_;
}
subgraph cluster1{
label="MapsManager";
initMaps;
}
subgraph cluster2{
label="CoreWrapper Nodelet";
onInit;
Callback;
}
subgraph cluster3{
label="RTABMap Corelib";
initRTABMap;
process;
}
subgraph cluster4{
label="Memory";
newMemory;
initMemory;
loadDataFromDb;
}
subgraph cluster5{
label="DBDriver";
createDB;
}
subgraph cluster6{
node [shape=box, size="20,20"];
{
Feature2D_create;
newVWDictionary;
Registration_create;
newRegistrationIcp;
newOccupancyGrid;
}
}
CoreNode -> onInit [label="nodelet::load()"];
onInit -> parameters_;
onInit -> initMaps;
onInit -> initRTABMap;
onInit -> Callback;
Callback -> process;
initRTABMap -> newMemory;
initRTABMap -> initMemory;
newMemory -> Feature2D_create [lhead=cluster6];
initMemory -> createDB;
initMemory -> loadDataFromDb;/points_xyzrgb
- 流程图
Code Analization
CameraModel
\[ FOV_{Horizontal} = \frac{W_{img}/2}{f_x} \]
Problem
- Transform::interpolate