vSLAM位姿优化中雅克比矩阵的求解
Last updated on March 2, 2026 pm
[TOC]
概述
SLAM,即 同时定位与建图,视觉SLAM的 定位 即 求取相机位姿(旋转和平移 \([\mathbf{R} \quad \mathbf{t}]\));在SLAM中,我们一般使用 李代数 \(\boldsymbol{\xi}\) 来表示 旋转和平移。
记 相机内参矩阵 \(\mathbf{K}\),相机位姿 \(\mathbf{T} = [\mathbf{R} \quad \mathbf{t}]\) (or \(\boldsymbol{\xi}\))
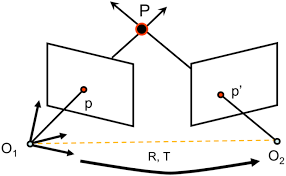
记 \(I_1\) 的图像坐标系下,一像素点 \(\mathbf{p}(u,v)\);在 \(O_1\) 相机坐标系下,其对应的 三维点 \(\mathbf{P}(X,Y,Z)\)
记 \(I_2\) 的图像坐标系下,一像素点 \(\mathbf{p'}(u',v')\);在 \(O_2\) 相机坐标系下,其对应的 三维点 \(\mathbf{P'}(X',Y',Z')\),归一化坐标为\(\mathbf{p'}_{norm}\)
\[ \mathbf{P'} = \mathbf{R} \cdot \mathbf{P} + \mathbf{t} \]
\[ \tilde{\mathbf{p'}}_{norm} = ({X'}_{norm},{Y'}_{norm},1) = \frac{\mathbf{P'}}{Z'} = (\frac{X'}{Z'}, \frac{Y'}{Z'}, 1) \]
\[ \tilde{\mathbf{p'}} = \mathbf{K} \cdot \tilde{\mathbf{p'}}_{norm} \]
在 优化位姿 时,其思想是构造一个关于位姿变化的误差函数,当这个误差函数最小时,认为此时估计的位姿最优。视觉SLAM主要分为 直接法 和 特征点法,但无论是直接法还是特征点法,位姿的迭代优化都是求解一个 最小二乘问题。
\[ \min_{\boldsymbol{\xi}} \frac{1}{2} \left\| r(\boldsymbol{\xi}) \right\|^2 \]
- 直接法 最小化 光度误差,即 前后帧像素的灰度误差
\[ \begin{aligned} r(\boldsymbol{\xi}) &= \mathbf{I}_2(\mathbf{p}') - \mathbf{I}_1(\mathbf{p}) \\ &= \mathbf{I}_2(u',v') - \mathbf{I}_1(u,v) \end{aligned} \]
- 特征点法 最小化 重投影误差,即地图点到当前图像投影点与匹配点的坐标误差
\[ \begin{aligned} r(\boldsymbol{\xi}) &= \mathbf{p}' - \mathbf{p} \\ &= (u',v') - (u,v) \end{aligned} \]
误差函数对于位姿的 雅可比矩阵(Jacobian Matrix),决定着下一步最优迭代估计时 位姿增量的方向。
\[ \mathbf{J}(\boldsymbol{\xi}) = \frac{\partial{r(\boldsymbol{\xi})}}{\partial \boldsymbol{\xi}} \]
根据上面位姿变换的流程,我们可以用 链式法则 来表示 \(\mathbf{J}\)
\[ \begin{aligned} \mathbf{J}(\boldsymbol{\xi}) &= \frac{\partial{r(\boldsymbol{\xi})}}{\partial \boldsymbol{\xi}} \\ &= \frac{\partial{r(\boldsymbol{\xi})}}{\partial \mathbf{p}'} \cdot \frac{\partial \mathbf{p}'}{\partial \mathbf{p}_{norm}'} \cdot \frac{\partial \mathbf{p}_{norm}'}{\partial \mathbf{P'}} \cdot \frac{\partial \mathbf{P'}}{\partial \boldsymbol{\xi}} \\ &= \mathbf{J}_0 \cdot \mathbf{J}_1 \cdot \mathbf{J}_2 \cdot \mathbf{J}_3 \end{aligned} \]
由此,直接法 与 特征点法 雅克比矩阵 只区别于 \(\mathbf{J}_0\)。
本文主要介绍 SLAM优化位姿时误差函数对位姿雅可比矩阵的推导。
雅克比矩阵 推导
\(J_0\)
\[ \mathbf{J}_0 = \frac{\partial{r(\boldsymbol{\xi})}}{\partial \mathbf{p}'} \]
直接法
我们已知, 在直接法中,单像素点的误差函数是关于像素值的函数,即 光度误差
\[ r(\boldsymbol{\xi}) = \mathbf{I}_2(u',v') - \mathbf{I}_1(u,v) \]
由于对于一个特定的像素点,\(\mathbf{I}_1(\mathbf{p})\) 是关于 \(\boldsymbol{\xi}\) 的常量,所以
\[ \begin{aligned} \mathbf{J}_0 &= \frac{\partial \mathbf{I}_2(\mathbf{p}')}{\partial \mathbf{p}'} \\ &= \bigg[ \frac{\mathbf{I}_2(u'+1,v')-\mathbf{I}_2(u'-1,v')}{2}, \frac{\mathbf{I}_2(u',v'+1)-\mathbf{I}_2(u',v'-1)}{2} \bigg] \end{aligned} \]
为 图像 \(\mathbf{I}_2\) 在 \(\mathbf{p}'\) 点处的 像素梯度
特征点法
我们已知, 在直接法中,单像素点的误差函数是关于像素坐标的函数
\[ r(\boldsymbol{\xi}) = \mathbf{p}' - \mathbf{p} \]
由于对于一个特定的像素点,\(\mathbf{p}\) 是关于 \(\boldsymbol{\xi}\) 的常量,所以
\[ \mathbf{J}_0 = \frac{\partial \mathbf{p}'}{\partial \mathbf{p}'} = \mathbf{I} \in \mathbb{R}^{2 \times 2} \]
\(J_1\)
\[ \mathbf{J}_1 = \frac{\partial \mathbf{p}'}{\partial \mathbf{p}_{norm}'} = \frac{\partial (u,v)}{\partial (X_{norm}',Y_{norm}')} \]
由于
\[ \tilde{\mathbf{p'}} = \mathbf{K} \cdot \tilde{\mathbf{p'}}_{norm} \]
\(\mathbf{J}_1\) 的计算跟 相机投影模型 有关,本文以 针孔相机模型 (不考虑畸变)为例 对其进行计算。
针孔相机模型(不考虑畸变) 的 数学模型 为
\[ \mathbf{K} = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \]
所以
\[ \mathbf{J}_1 = \begin{bmatrix} f_x & 0 \\ 0 & f_y \end{bmatrix} \in \mathbb{R}^{2 \times 2} \]
\(J_2\)
\[ \begin{aligned} \mathbf{J}_2 &= \frac{\partial \mathbf{p}_{norm}'}{\partial \mathbf{P'}} \\ &= \frac{\partial (X_{norm}',Y_{norm}')}{\partial (X',Y',Z')} \end{aligned} \]
根据
\[ \tilde{\mathbf{p'}}_{norm} = \frac {\mathbf{P'}} {Z'} \]
计算得
\[ \begin{aligned} \mathbf{J}_2 &= \begin{bmatrix} \frac{1}{Z'} & 0 & -\frac{X'}{Z'^2} \\ 0 & \frac{1}{Z'} & -\frac{Y'}{Z'^2} \end{bmatrix} \\ &= \begin{bmatrix} 1 & 0 & -\frac{X'}{Z'} \\ 0 & 1 & -\frac{Y'}{Z'} \end{bmatrix} \cdot \frac{1}{Z'} \in \mathbb{R}^{2 \times 3} \end{aligned} \]
\(J_3\)
使用 李代数
\[ \begin{aligned} \mathbf{J}_3 &= \frac{\partial \mathbf{P'}}{\partial \boldsymbol{\xi}} \\ &= \frac{\partial (\mathbf{T} \cdot \mathbf{P})}{\partial \boldsymbol{\xi}} \\ &= \frac{\partial ( \exp(\boldsymbol{\xi}^{\wedge}) \mathbf{P}) }{\partial \boldsymbol{\xi}} \end{aligned} \]
其中
\[ \boldsymbol{\xi} = \begin{bmatrix} \boldsymbol{\rho} \\ \boldsymbol{\phi} \end{bmatrix} \in \mathbb{R}^6 \]
类似高数中,求取 \(f(x)\) 的导数
\[ \frac{df}{dx} = \lim_{\Delta x \rightarrow 0} \frac{f(x+\Delta x) - f(x)}{\Delta x} \]
我们可以 根据李代数加法来对李代数进行求导,计算雅克比矩阵。
一般更使用的,利用李群来左乘或者右乘微小扰动,在对这个扰动的李代数进行求导,利用 扰动模型 \(\delta \boldsymbol{\xi} = [\delta \boldsymbol{\rho} \quad \delta \boldsymbol{\phi}]\),计算如下
\[ \begin{aligned} \frac{\partial \tilde{\mathbf{P'}}}{\partial \boldsymbol{\xi}} &= \frac{\partial (\mathbf{T} \cdot \tilde{\mathbf{P}})}{\partial \boldsymbol{\xi}} \\ &= \frac{\partial ( \exp(\boldsymbol{\xi}^{\wedge}) \tilde{\mathbf{P}} ) }{\partial \delta \boldsymbol{\xi}} \quad \text{(左扰动模型)} \\ &= \lim_{\delta \boldsymbol{\xi} \rightarrow 0} \frac { \exp(\delta \boldsymbol{\xi}^{\wedge}) \exp(\boldsymbol{\xi}^{\wedge}) \tilde{\mathbf{P}} - \exp(\boldsymbol{\xi}^{\wedge}) \tilde{\mathbf{P}} } { \delta \boldsymbol{\xi} } \\ &\approx \lim_{\delta \boldsymbol{\xi} \rightarrow 0} \frac { (\mathbf{I}+ \delta \boldsymbol{\xi}^{\wedge}) \exp(\boldsymbol{\xi}^{\wedge}) \tilde{\mathbf{P}} - \exp(\boldsymbol{\xi}^{\wedge}) \tilde{\mathbf{P}} } { \delta \boldsymbol{\xi} } \\ &= \lim_{\delta \boldsymbol{\xi} \rightarrow 0} \frac { \delta \boldsymbol{\xi}^{\wedge} \exp(\boldsymbol{\xi}^{\wedge}) \tilde{\mathbf{P}} } { \delta \boldsymbol{\xi} } \\ &= \lim_{\delta \boldsymbol{\xi} \rightarrow 0} \frac { \begin{bmatrix} \delta \boldsymbol{\phi}^{\wedge} & \delta \boldsymbol{\rho} \\ \mathbf{0}^{T} & 0 \end{bmatrix} \begin{bmatrix} \mathbf{R} \cdot \mathbf{P} + \mathbf{t} \\ 1 \end{bmatrix} } { \delta \boldsymbol{\xi} } \\ &= \lim_{\delta \boldsymbol{\xi} \rightarrow 0} \frac { \begin{bmatrix} \delta \boldsymbol{\phi}^{\wedge} (\mathbf{R} \cdot \mathbf{P} + \mathbf{t}) + \delta \boldsymbol{\rho} \\ 0 \end{bmatrix} } { \delta \boldsymbol{\xi} } \\ &= \begin{bmatrix} \mathbf{I} & -(\mathbf{R} \cdot \mathbf{P} + \mathbf{t})^{\wedge} \\ \mathbf{0}^{T} & \mathbf{0}^{T} \end{bmatrix} \\ &= \begin{bmatrix} \mathbf{I} & -\mathbf{P}'^{\wedge} \\ \mathbf{0}^{T} & \mathbf{0}^{T} \end{bmatrix} \end{aligned} \]
所以
\[ \begin{aligned} \mathbf{J}_3 &= \begin{bmatrix} \mathbf{I} & -\mathbf{P}'^{\wedge} \end{bmatrix} \\ &= \begin{bmatrix} 1 & 0 & 0 & 0 & Z' & -Y' \\ 0 & 1 & 0 & -Z' & 0 & X' \\ 0 & 0 & 1 & Y' & -X' & 0 \end{bmatrix} \in \mathbb{R}^{3 \times 6} \end{aligned} \]
注意: * 上面的 \(\boldsymbol{\xi}\) 中 平移 \(\boldsymbol{\rho}\) 在前, 旋转 \(\boldsymbol{\phi}\) 在后;如果 旋转在前,平移在后,则 \(\mathbf{J}_3\) 的前三列与后三列须对调。
- ch4 为什么能用左扰动模型来求导啊?[gaoxiang12/slambook Issues #183] > 按照定义,左乘一个扰动,然后令扰动趋于零,求目标函数相对于扰动的变化率,作为导数来使用。同时,在优化过程中,用这种导数算出来的增量,以左乘形式更新在当前估计上,于是使估计值一直在SO(3)或SE(3)上。这种手段称为“流形上的优化”。
- 四元数矩阵与 so(3) 左右雅可比
使用 四元数
若旋转使用 四元数 表示,则更新小量为 \(\begin{bmatrix} \delta \mathbf{t} \\ \delta \boldsymbol{\theta} \end{bmatrix}\),则
\[ \begin{aligned} \mathbf{J}_3 &= \frac{\partial \mathbf{P'}} {\partial \begin{bmatrix} \delta \mathbf{t} \\ \delta \boldsymbol{\theta} \end{bmatrix}} &= \frac{\partial (\mathbf{R} \cdot \mathbf{P} + \mathbf{t})} {\partial \begin{bmatrix} \delta \mathbf{t} \\ \delta \boldsymbol{\theta} \end{bmatrix}} &= \left[ \frac{\partial \mathbf{t}}{\partial \delta \mathbf{t}} \quad \frac{\partial (\mathbf{R} \cdot \mathbf{P})}{\partial \delta \boldsymbol{\theta}} \right] \end{aligned} \]
with
\[ \begin{aligned} \frac{\partial (\mathbf{R} \cdot \mathbf{P})}{\partial \delta \boldsymbol{\theta}} &= \lim_{\delta \boldsymbol{\theta} \rightarrow 0} \frac {\exp(\delta \boldsymbol{\theta}^\wedge) \mathbf{R} \mathbf{P} - \mathbf{R} \mathbf{P}} {\delta \boldsymbol{\theta}} \\ &= \lim_{\delta \boldsymbol{\theta} \rightarrow 0} \frac {(\mathbf{I} + \delta \boldsymbol{\theta}^\wedge) \mathbf{R} \mathbf{P} - \mathbf{R} \mathbf{P}} {\delta \boldsymbol{\theta}} \\ &= \lim_{\delta \boldsymbol{\theta} \rightarrow 0} \frac {\delta \boldsymbol{\theta}^\wedge \mathbf{R} \mathbf{P}}{\delta \boldsymbol{\theta}} \\ &= -{(\mathbf{R} \cdot \mathbf{P})}^\wedge \end{aligned} \]
此时
\[ \begin{aligned} \mathbf{J}_3 = \left[ \mathbf{I}_{3 \times 3} \quad -{(\mathbf{R} \cdot \mathbf{P})}^\wedge \right] \end{aligned} \]
总结
直接法
\[ \begin{aligned} \mathbf{J}(\boldsymbol{\xi}) &= \mathbf{J}_0 \cdot \mathbf{J}_1 \cdot \mathbf{J}_2 \cdot \mathbf{J}_3 \\ &= \frac{\partial \mathbf{I}_2(\mathbf{p}')}{\partial \mathbf{p}'} \cdot \begin{bmatrix} f_x & 0 \\ 0 & f_y \end{bmatrix} \cdot \begin{bmatrix} 1 & 0 & -\frac{X'}{Z'} \\ 0 & 1 & -\frac{Y'}{Z'} \end{bmatrix} \cdot \begin{bmatrix} 1 & 0 & 0 & 0 & Z' & -Y' \\ 0 & 1 & 0 & -Z' & 0 & X' \\ 0 & 0 & 1 & Y' & -X' & 0 \end{bmatrix} \cdot \frac{1}{Z'} \end{aligned} \]
特征点法
- 使用 李代数
\[ \begin{aligned} \mathbf{J}(\boldsymbol{\xi}) &= \mathbf{J}_0 \cdot \mathbf{J}_1 \cdot \mathbf{J}_2 \cdot \mathbf{J}_3 \\ &= \mathbf{I} \cdot \begin{bmatrix} f_x & 0 \\ 0 & f_y \end{bmatrix} \cdot \begin{bmatrix} 1 & 0 & -\frac{X'}{Z'} \\ 0 & 1 & -\frac{Y'}{Z'} \end{bmatrix} \cdot \begin{bmatrix} 1 & 0 & 0 & 0 & Z' & -Y' \\ 0 & 1 & 0 & -Z' & 0 & X' \\ 0 & 0 & 1 & Y' & -X' & 0 \end{bmatrix} \cdot \frac{1}{Z'} \\ &= \begin{bmatrix} \frac{f_x}{Z'} & 0 & -\frac{X'f_x}{Z'^2} \\ 0 & \frac{f_y}{Z'} & -\frac{Y'f_y}{Z'^2} \end{bmatrix} \cdot \begin{bmatrix} 1 & 0 & 0 & 0 & Z' & -Y' \\ 0 & 1 & 0 & -Z' & 0 & X' \\ 0 & 0 & 1 & Y' & -X' & 0 \end{bmatrix} \\ &= \begin{bmatrix} \frac{f_x}{Z'} & 0 & -\frac{X'f_x}{Z'^2} & -\frac{X'Y'f_x}{Z'^2} & f_x+\frac{X'^2f_x}{Z'^2} & -\frac{Y'f_x}{Z'} \\ 0 & \frac{f_y}{Z'} & -\frac{Y'f_y}{Z'^2} & -f_y-\frac{Y'^2f_y}{Z'^2} & \frac{X'Y'f_y}{Z'^2} & \frac{X'f_y}{Z'} \end{bmatrix} \end{aligned} \]
- 使用 四元数
\[ \mathbf{J} = \begin{bmatrix} \frac{f_x}{Z'} & 0 & -\frac{X'f_x}{Z'^2} \\ 0 & \frac{f_y}{Z'} & -\frac{Y'f_y}{Z'^2} \end{bmatrix} \cdot \left[ \mathbf{I}_{3 \times 3} \quad -{(\mathbf{R} \cdot \mathbf{P})}^\wedge \right] \]
注意事项
- \(\mathbf{J}_1\) 的计算是根据 针孔相机模型(不考虑畸变) 进行计算的
- 本文的 \(\boldsymbol{\xi}\) 中 平移 \(\boldsymbol{\rho}\) 在前, 旋转 \(\boldsymbol{\phi}\) 在后;如果 旋转在前,平移在后,则 \(\mathbf{J}_3\) 的前三列与后三列须对调
- 本文定义的 误差函数 \(r(\boldsymbol{\xi})\) 为 预测值减观测值;如果定义成 观测值减预测值,本文计算的结果 \(\mathbf{J}\) 前须加 负号
参考文献
《视觉SLAM十四讲》