Multi-Sensor Fusion: LiDAR and Radar fusion based on UKF
Last updated on March 2, 2026 pm
[TOC]
Overview
EKF v.s. UKF v.s. PF
- EKF: 通过 泰勒分解将模型线性化 求出预测模型的概率均值和方差
- 线性、高斯
- 对于非线性问题, EKF除了计算量大,还有线性误差的影响
- UKF: 通过 不敏变换 来求出预测模型的均值和方差
- 非线性、高斯
- UKF生成了一些点,来近似非线性,由这些点来决定实际x和P的取值范围
- 跟 粒子滤波器(PF) 不同的是,UKF里Sigma点的生成并没有概率的问题
- PF: 非线性、非高斯
UKF v.s. CKF
UKF、CKF:同属点估计方法,不是说高斯分布非线性转移以后不再是高斯分布,所以kf无法继续迭代么。那么它俩就不管了,在转移之前取一坨点近似一个分布,直接通过数学模型算出转移以后的一坨点(代x算fx),然后通过一些“科学方法”去估计转移以后的那一坨点的高斯分布。
ukf使用的“科学方法”叫无迹变换,ckf使用的“科学方法”叫球面径向xxx变换。
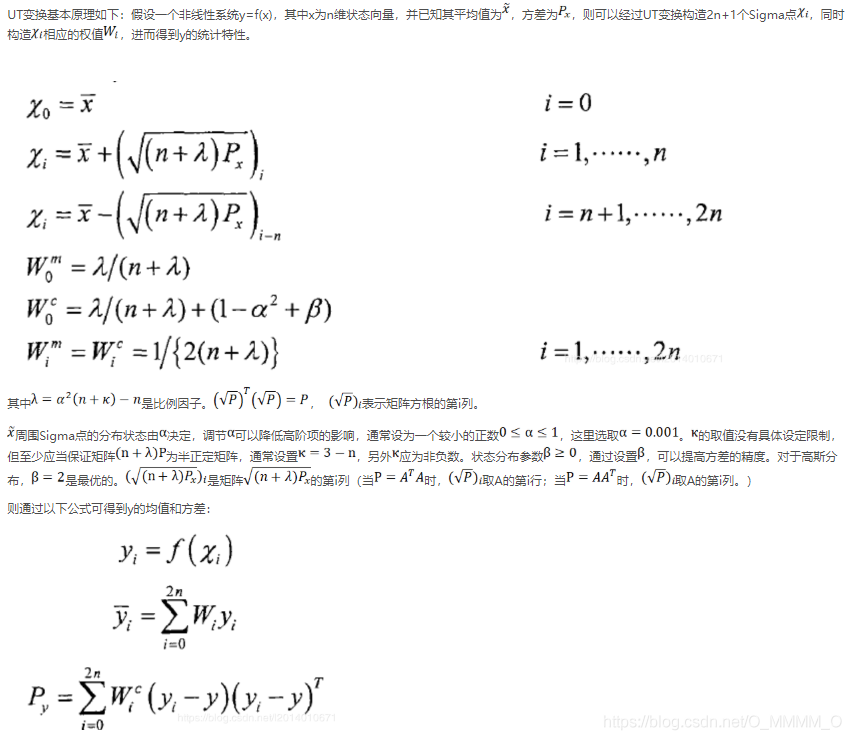
搞过ukf的人应该都知道,ukf中的核心问题就是sigma点的选取,针对高斯分布的最优sigma采样及是高斯分布的均值μ与μ两边的+-标准差两点乘以一个缩放因子scaler,要想得到标准差的值,就必须要将协方差矩阵开平方根,也就是cholesky方法。
cholesky要求必须协方差矩阵P是正定的(不能对负数开平方),而由于数学模型误差,ukf迭代不了多久P就会不正定了,此时会产生cholesky数值异常,再也无法迭代了。解决方法通常使用svd分解代替cholesky或者用svd找临近半正定,但是ukf本来就够慢了,如果再使用svd这种复杂度高的方法,简直就是作死-。
所以 工程上一般会精心调参让协方差尽量保持正定,当出现负定的时候将协方差矩阵非对角元强制清零,使其重新收敛,此方法用在我们的无人机上一直很好使,即使出现了负定的情况,各状态也只会产生比较小的波动,能够接受。
UKF
UKF的Sigma点就是把不能解决的非线性单个变量的不确定性,用多个Sigma点的不确定性近似了。

UKF过程如下:
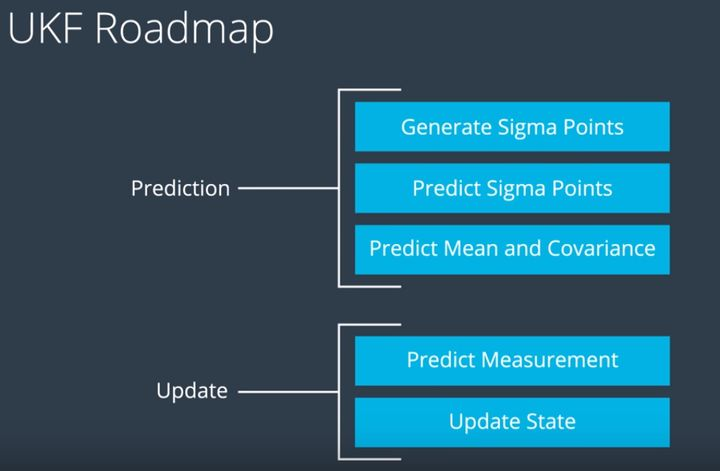
UT变换
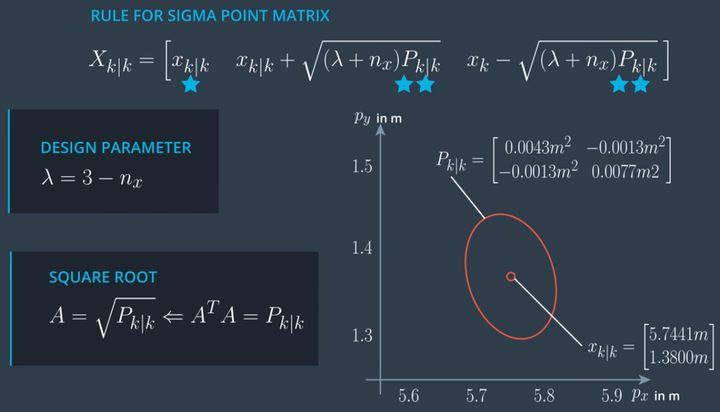
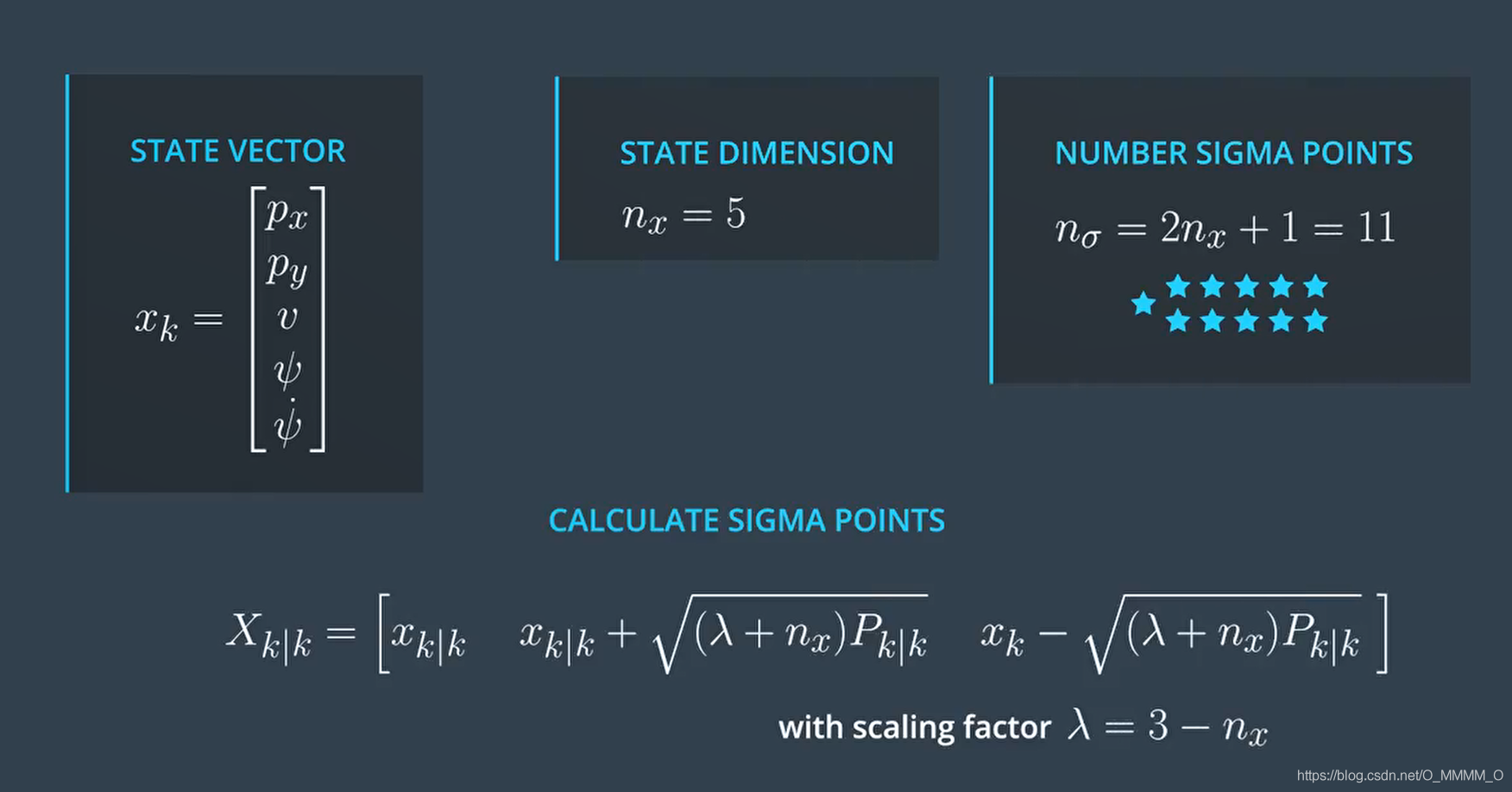
Generate Sigma Points
- 我们的状态向量维度为 \(n=5\),Sigma点数为 \(2n+1 = 11\)
- 每个Sigma Point的协方差矩阵P维度为 5x5
- 所有的Sigma点就组成了 5x11 的矩阵,代表的含义就是按照一定规律生成了环绕在 x 周边的10个点,由这10个点的平均值定义 x 的实际值
- \(\lambda\) 是Sigma点离 x 的距离

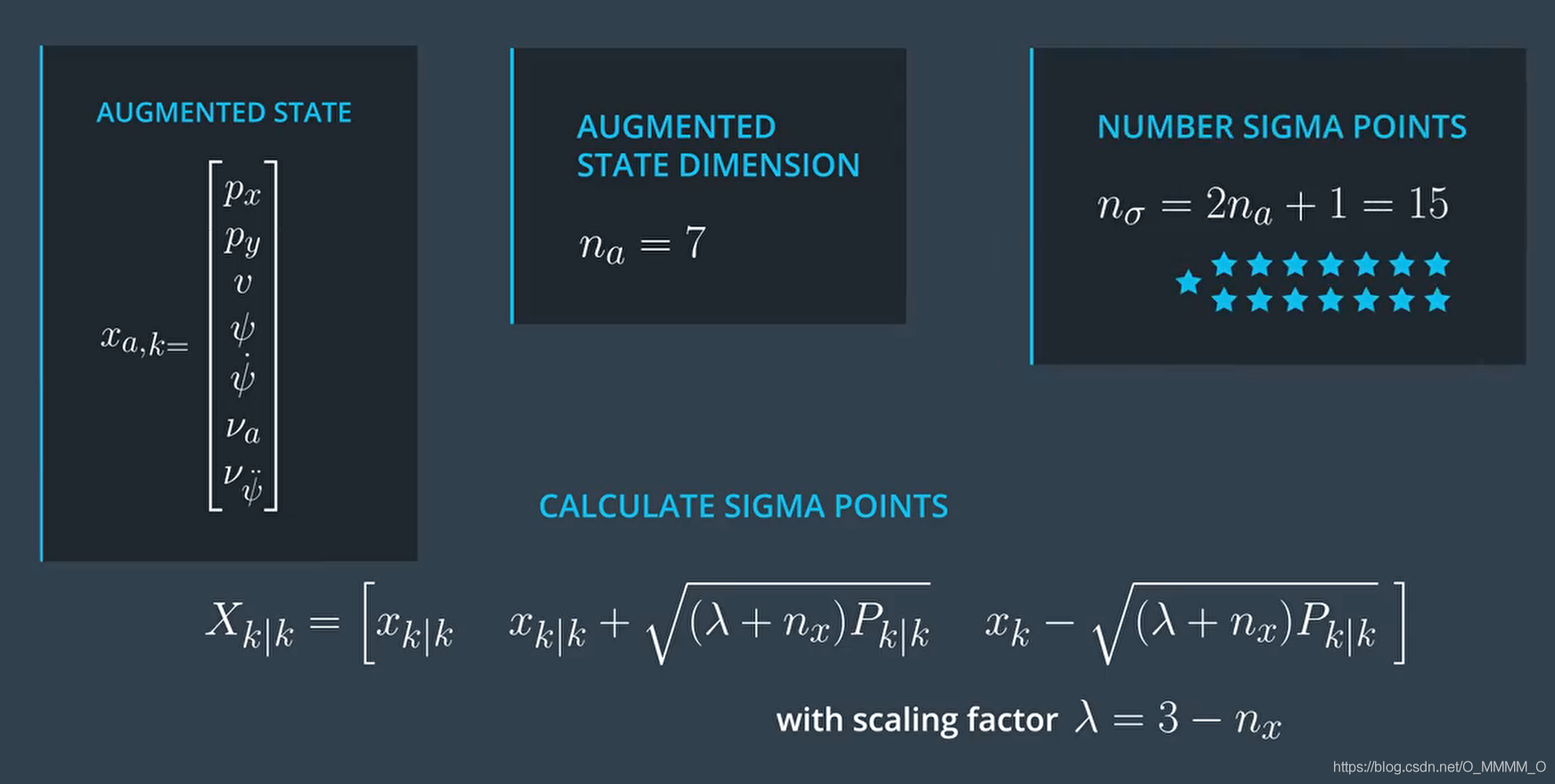
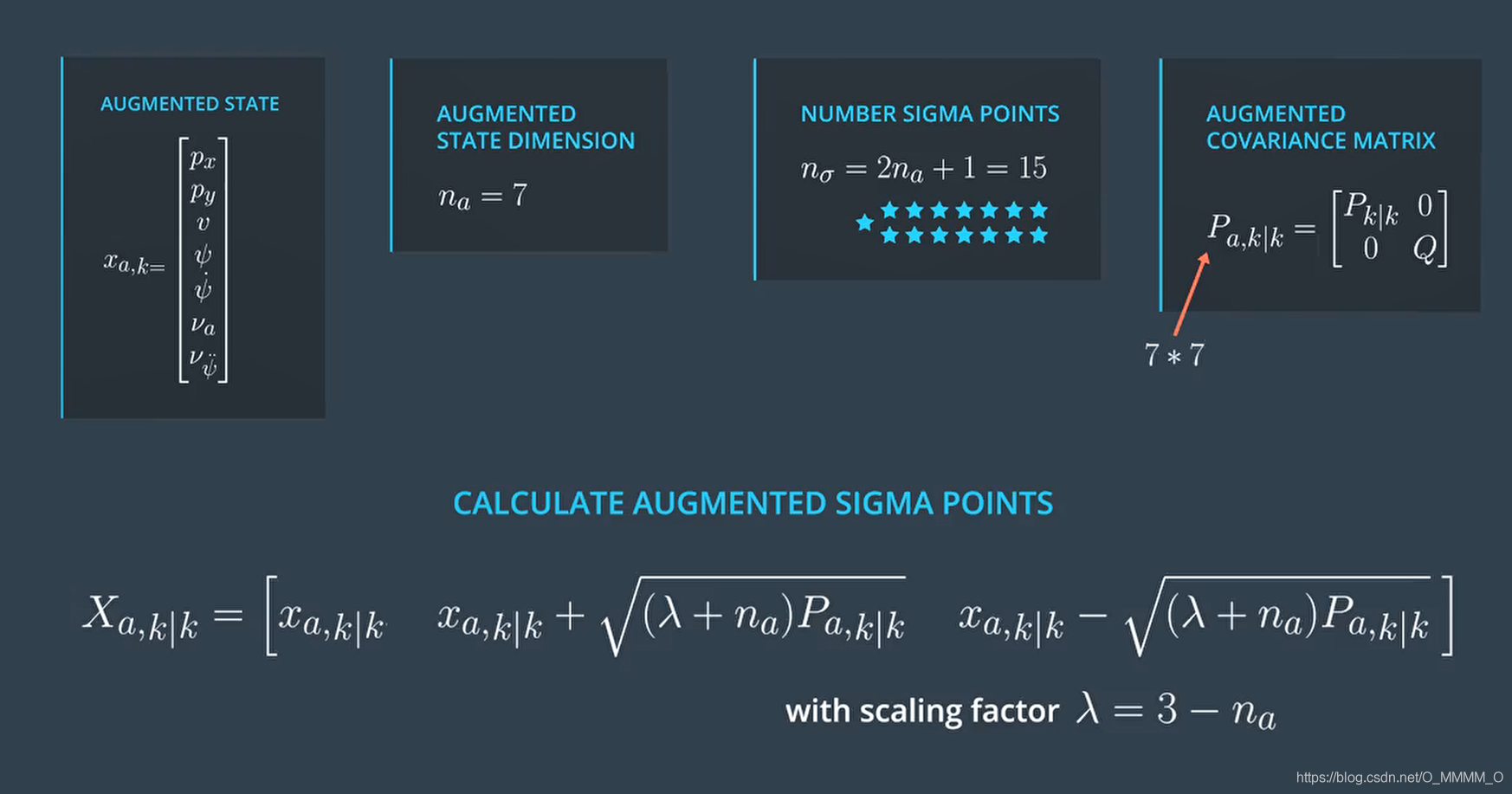
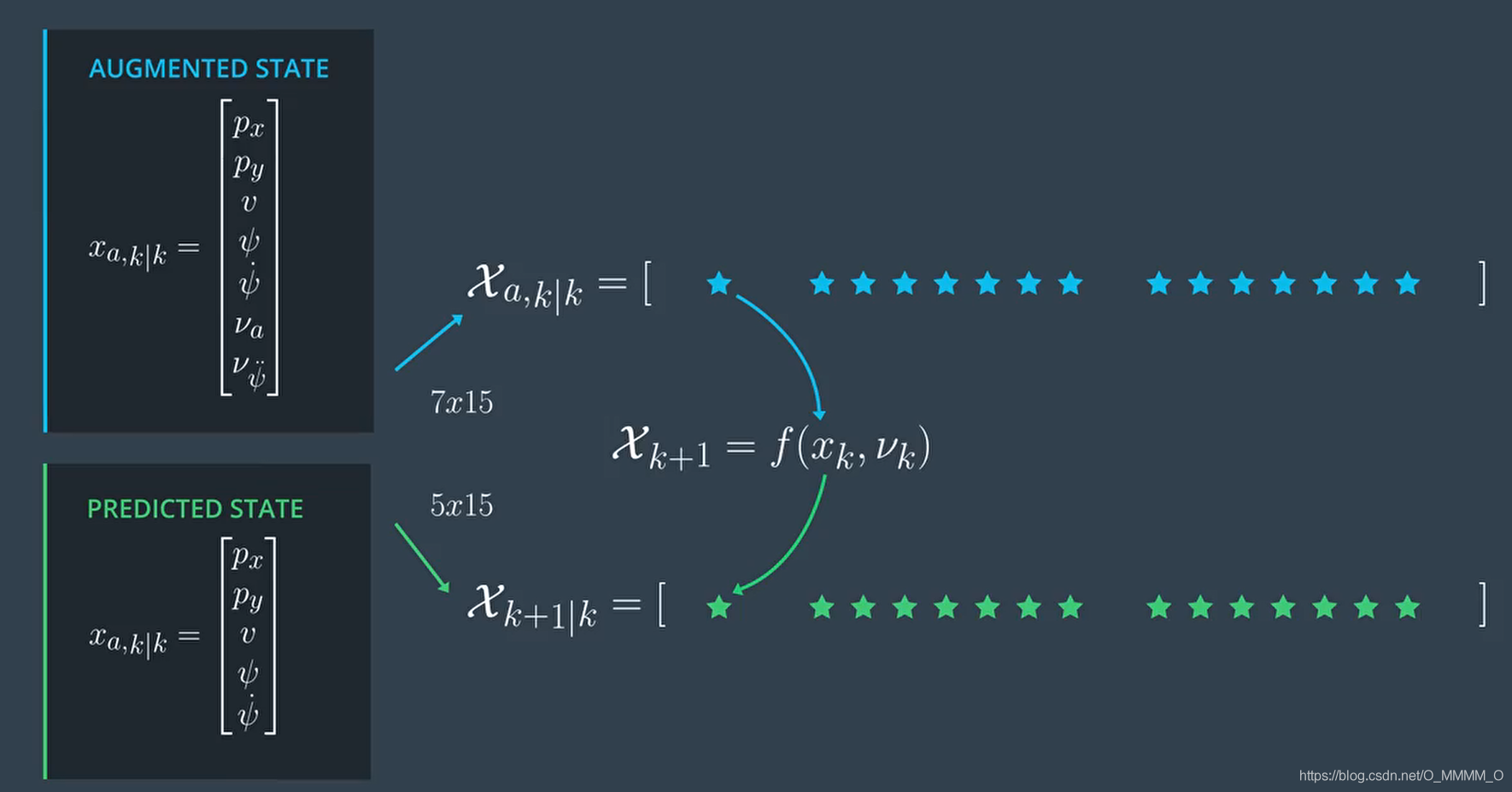
Augmented State (Sigma Points)
考虑到 预测(过程)噪声(加速度与角加速度)
\[\begin{aligned}\nu_{a, k} & \sim N\left(0, \sigma_{a}^{2}\right) \\\nu_{\ddot{\psi}, k} & \sim N\left(0, \sigma_{\ddot{\psi}}^{2}\right)\end{aligned}\]
我们的状态方程里面是有噪声 \(v_k\) 的,当这个 \(v_k\) 对我们的状态转移矩阵有影响的话,我们需要讲这个噪声考虑到我们的状态转移矩阵里面的,所以我们同时也把 \(v_k\) 当作一种状态(噪声状态)放进我们的状态变量空间里。
- 状态向量
augmented_x维度为 \(n=7\),Sigma点数为 \(2n+1 = 15\) - 每个Sigma Point的协方差矩阵P
augmented_P维度为 7x7
1 | |
Predict Process
1 | |
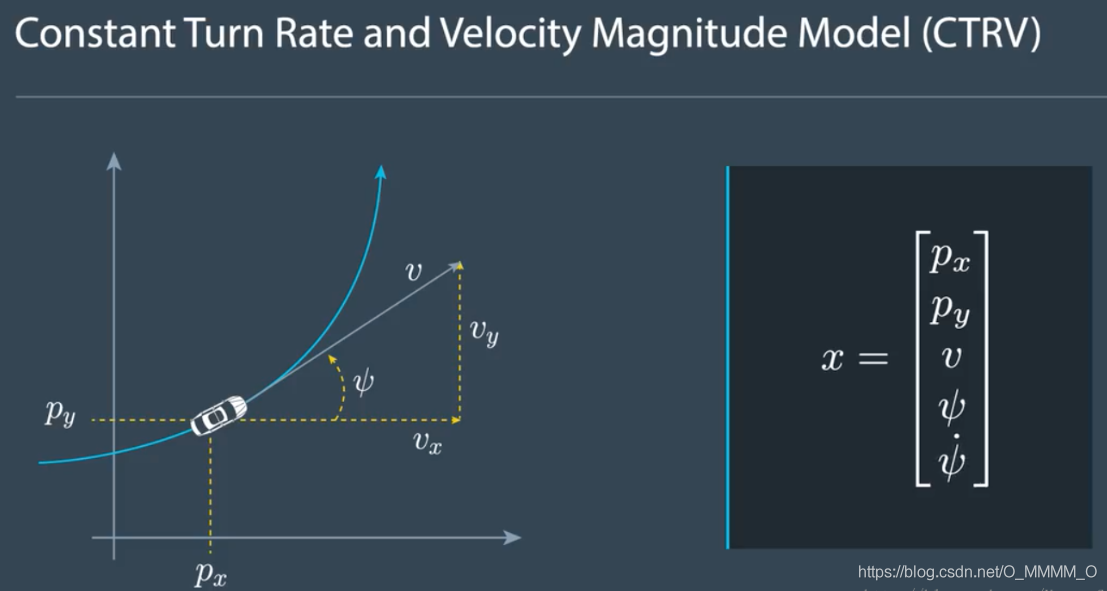
Motion Model (CTRV)
CTRV (constant turn rate and velocity magnitude)
- constant
turn rate\(\psi\) andvelocity\(\nu\) - state vector: \(n=5\)
\[ x_{k+1}=x_{k}+\left[\begin{array}{c}\frac{v_{k}}{\dot{\psi}_{k}}\left(\sin \left(\psi_{k}+\dot{\psi}_{k} \Delta t\right)-\sin \left(\psi_{k}\right)\right) \\\frac{v_{k}}{\dot{\psi}_{k}}\left(-\cos \left(\psi_{k}+\dot{\psi_{k}} \Delta t\right)+\cos \left(\psi_{k}\right)\right) \\0 \\\dot{\psi_{k}} \Delta t \\0\end{array}\right] \in \mathbb{R}^5 \]
考虑到 过程噪声,该过程模型为
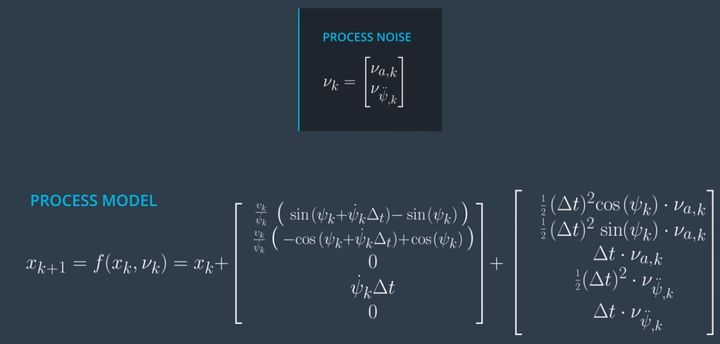
\[ x_{k+1}=x_{k}+\left[\begin{array}{c}\frac{v_{k}}{\dot{\psi}_{k}}\left(\sin \left(\psi_{k}+\dot{\psi}_{k} \Delta t\right)-\sin \left(\psi_{k}\right)\right) \\\frac{v_{k}}{\dot{\psi}_{k}}\left(-\cos \left(\psi_{k}+\dot{\psi_{k}} \Delta t\right)+\cos \left(\psi_{k}\right)\right) \\0 \\\dot{\psi_{k}} \Delta t \\0\end{array}\right] + \left[\begin{array}{c} \frac{1}{2} \nu_{a, k} \cos \left(\psi_{k}\right) \Delta t^{2} \\ \frac{1}{2} \nu_{a, k} \sin \left(\psi_{k}\right) \Delta t^{2} \\ \nu_{a, k} \Delta t \\ \frac{1}{2} \nu_{\ddot{\psi}, k} \Delta t^{2} \\ \nu_{\ddot{\psi}, k} \Delta t \end{array}\right] \in \mathbb{R}^5 \]
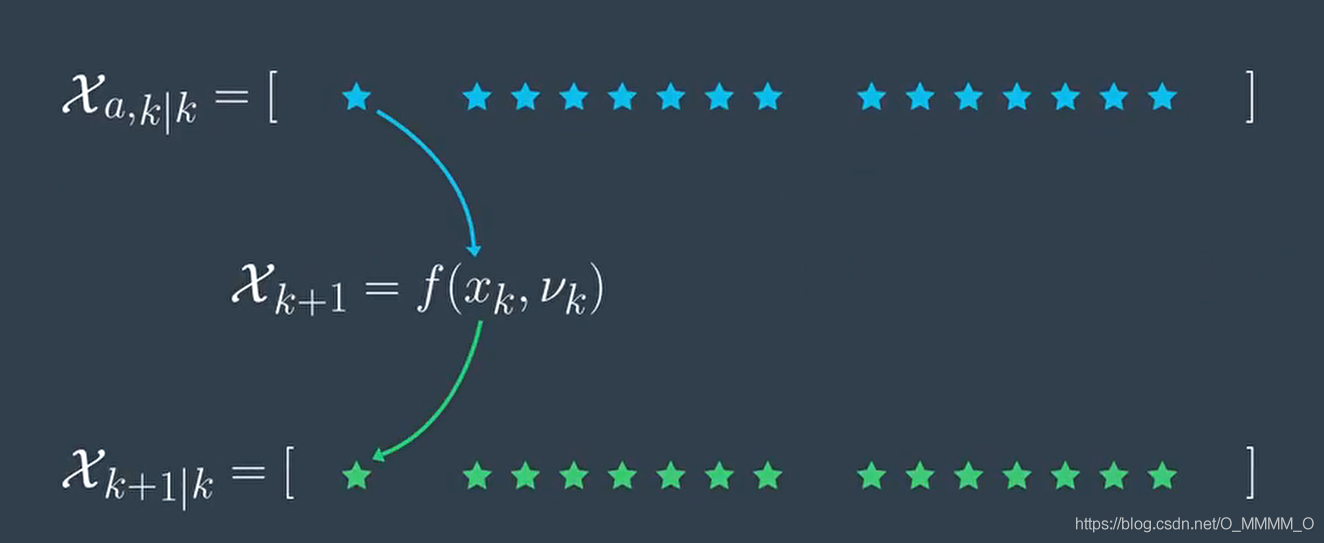
Predict Sigma Points
通过 过程模型,将 增广状态Sigma Points 转换为 预测状态Sigma Points
Predict Mean and Covariance
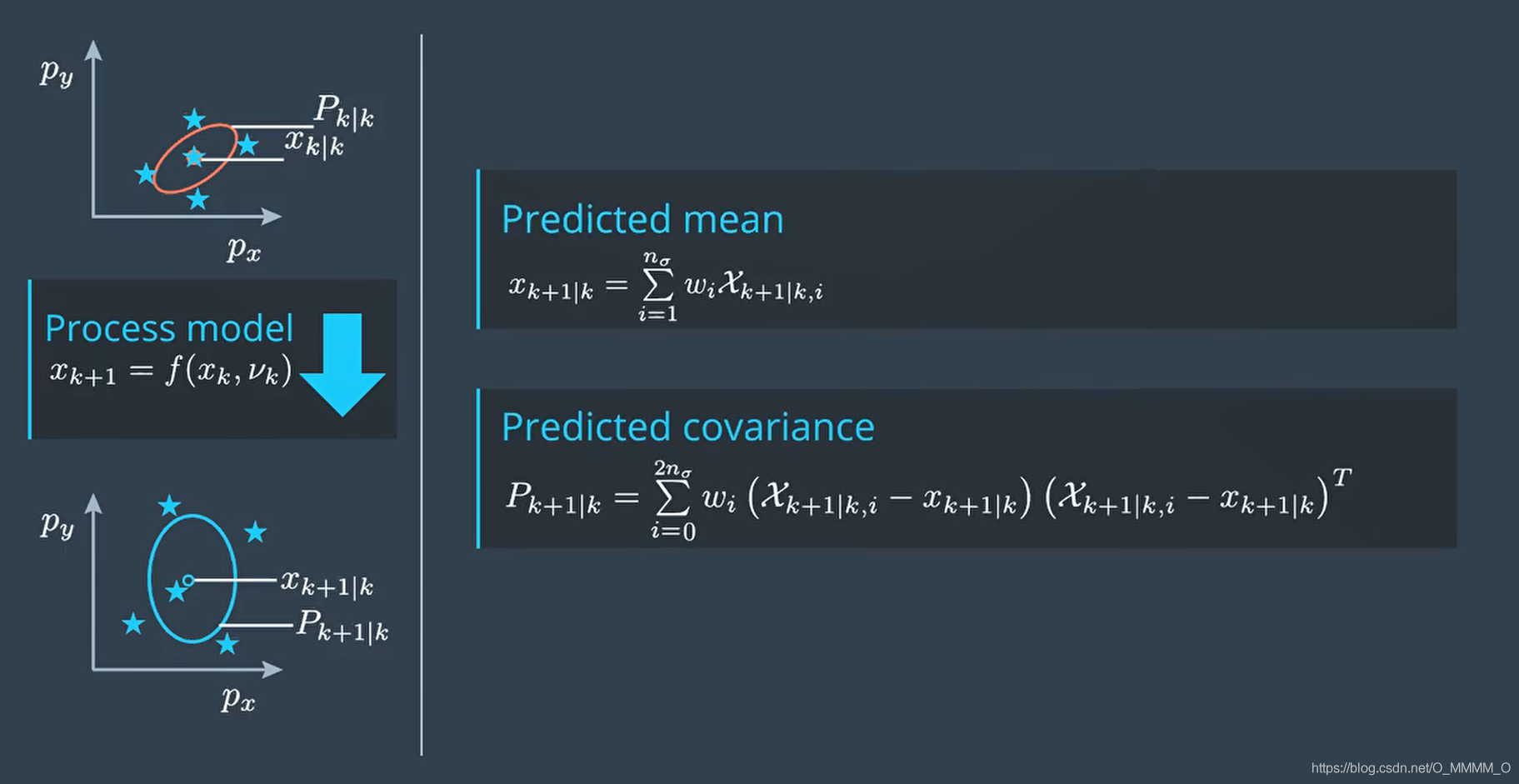
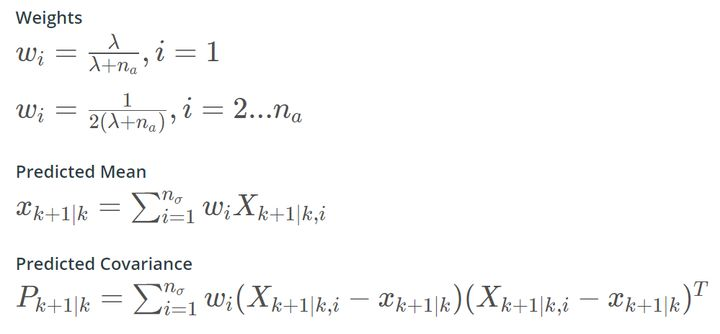
predicted x
1
2
3for (int c = 0; c < NSIGMA; c++) {
predicted_x += WEIGHTS[c] * predicted_sigma.col(c);
}predicted P
1
2
3
4
5for (int c = 0; c < NSIGMA; c++) {
dx = predicted_sigma.col(c) - predicted_x;
dx(3) = normalize(dx(3));
predicted_P += WEIGHTS[c] * dx * dx.transpose();
}
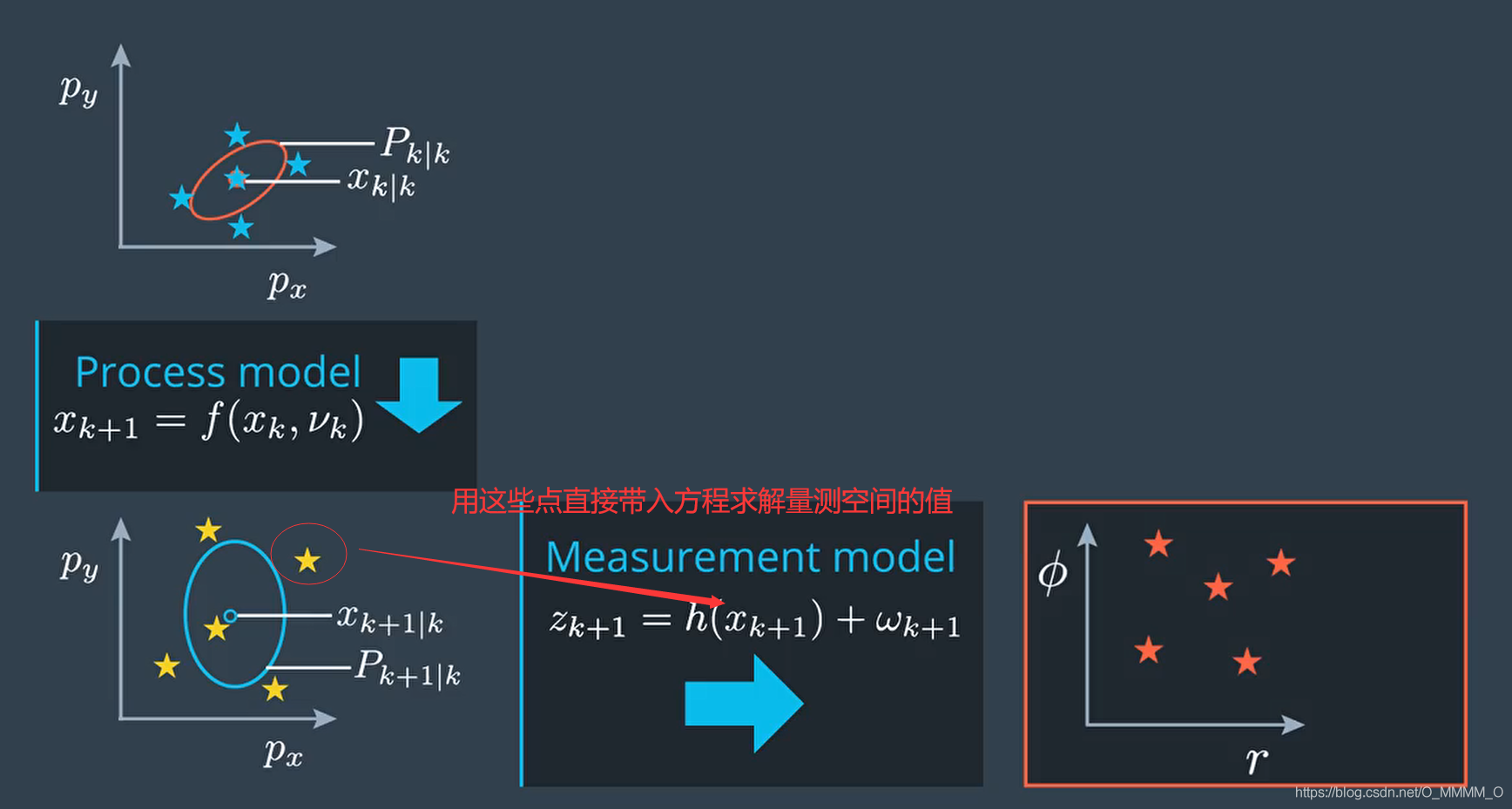
Predict Measurement
针对不同的传感器,测量值z求均值和方差的方式也不同,本文以CTRV模型为基础,通过激光雷达(Lidar)和毫米波雷达(Radar)跟踪车辆位置为例讲解。
1 | |
Lidar测量方程
\[ z = \left(\begin{array}{c}{p_{x}} \\ {p_{y}}\end{array}\right) \]
Radar测量方程
\[ z = \left(\begin{array}{l} {\rho} \\ {\varphi} \\ {\dot{\rho}} \end{array}\right) = h(x^{\prime}) = \left(\begin{array}{c} {\sqrt{p_{x}^{\prime 2}+p_{y}^{\prime 2}}} \\ {\arctan \left(p_{y}^{\prime} / p_{x}^{\prime}\right)} \\ {\frac{p_{x}^{\prime} v_{x}^{\prime}+p_{y} v_{y}^{\prime}}{\sqrt{p_{x}^{\prime 2}+p_{y}^{\prime 2}}}} \end{array}\right) \]
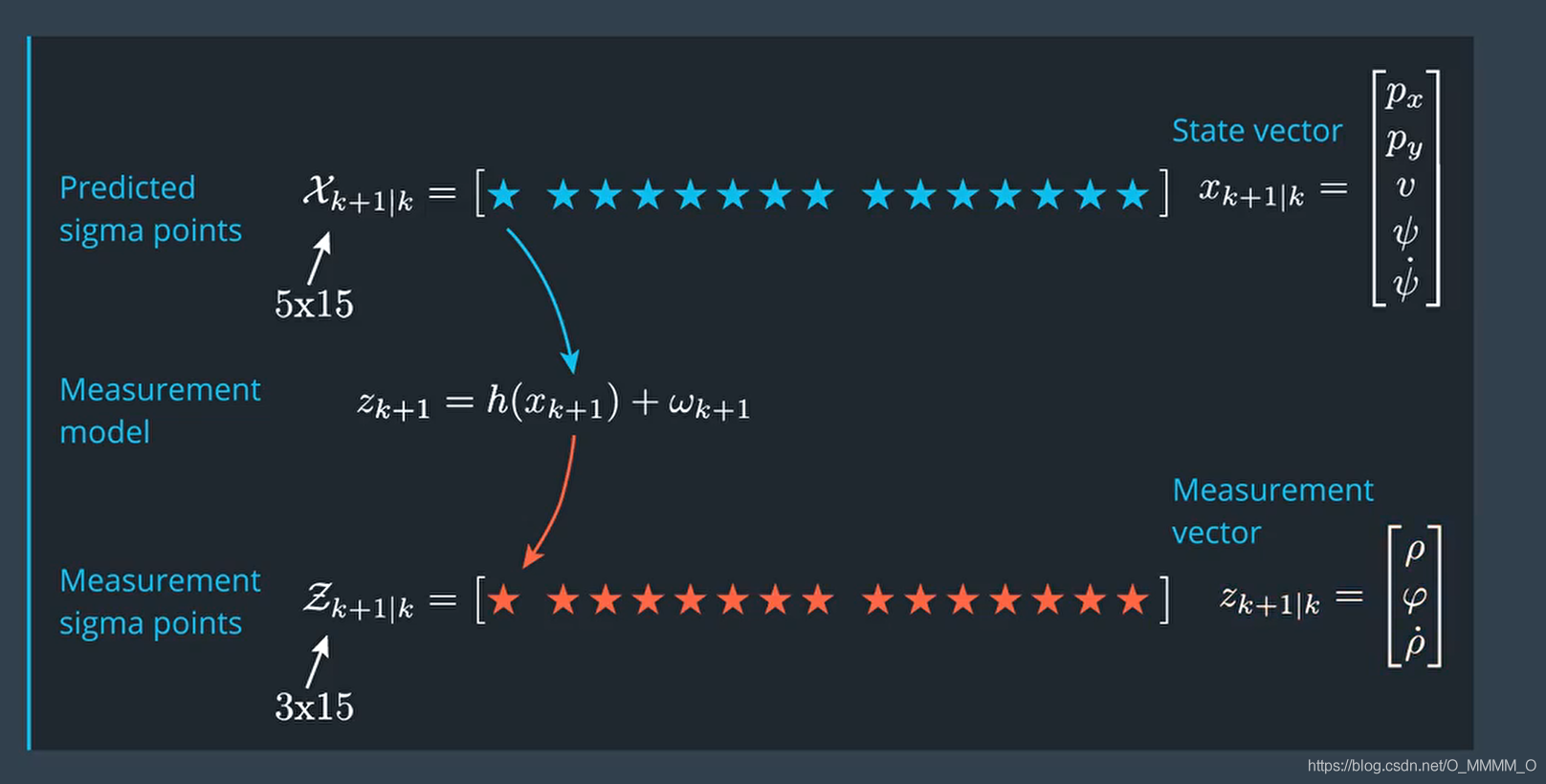
Predict Measurement Sigma Points
LiDAR Measurement Sigma Points (2 x 15)
Radar Measurement Sigma Points (3 x 15)
1 | |
Predict Measurement Mean and Covariance
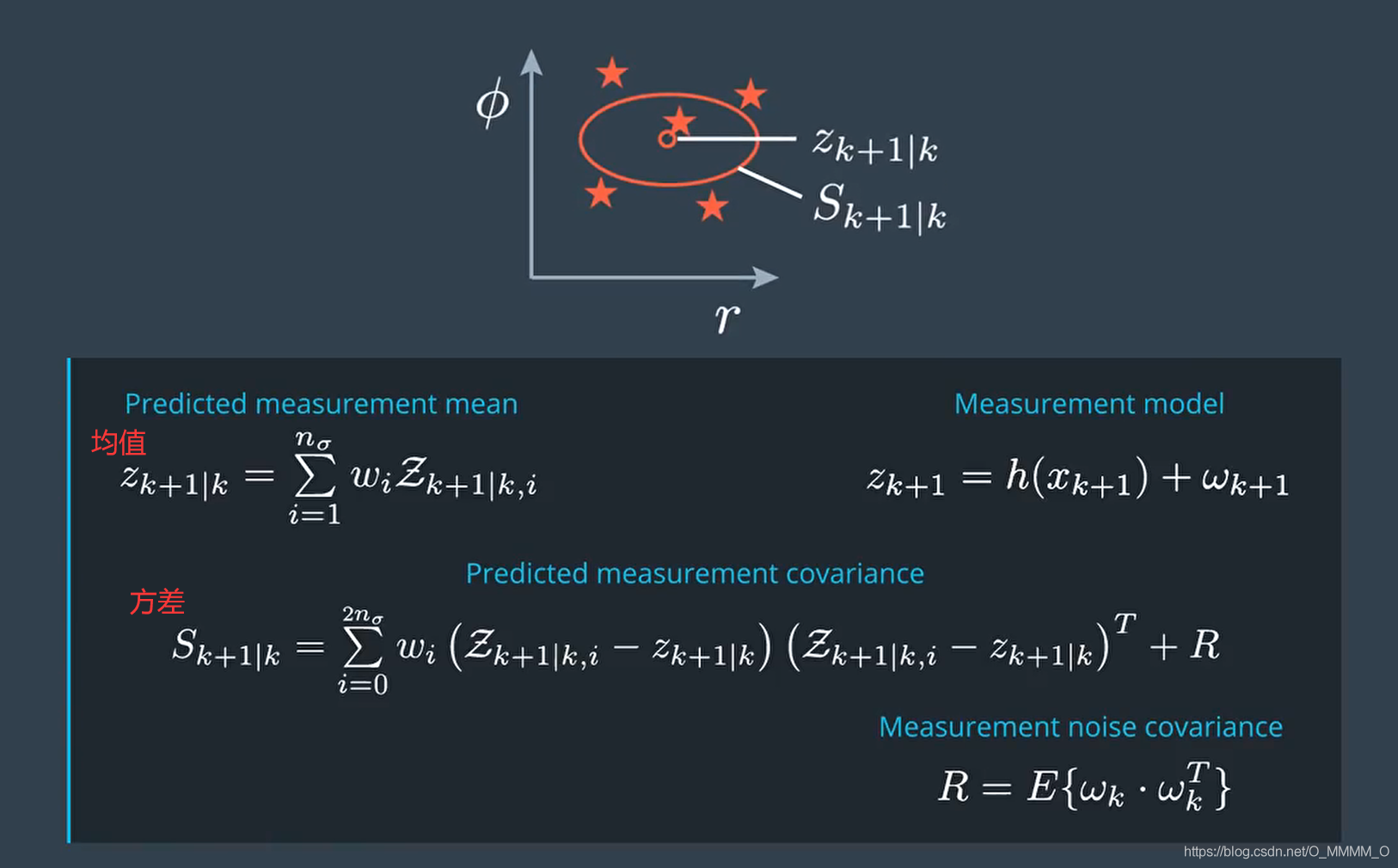
Predict Measurement Mean
1
2
3
4VectorXd z = VectorXd::Zero(this->nz);
for (int c = 0; c < NSIGMA; c++) {
z += WEIGHTS[c] * sigma.col(c);
}Predict Measurement Covariance
1
2
3
4
5
6
7
8
9MatrixXd S = MatrixXd::Zero(this->nz, this->nz);
for (int c = 0; c < NSIGMA; c++) {
dz = sigma.col(c) - z;
if (this->current_type == DataPointType::RADAR) {
dz(1) = normalize(dz(1));
}
S += WEIGHTS[c] * dz * dz.transpose();
}
S += this->R;
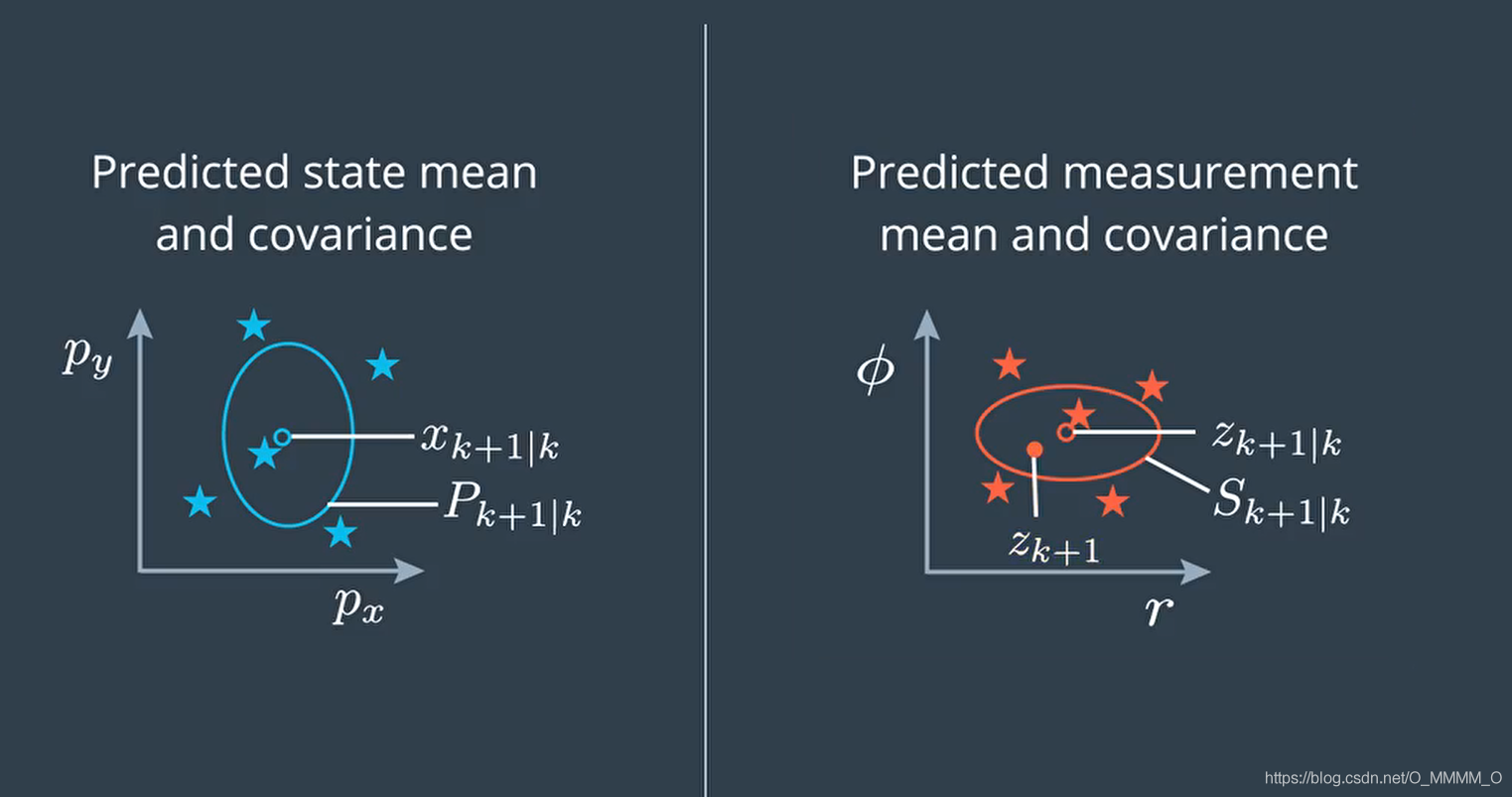
Update State
求出测量值z的均值和方差,然后这两个分布相乘就可以求出新的状态分布了,这个和传统的卡尔曼滤波基本是一样的。
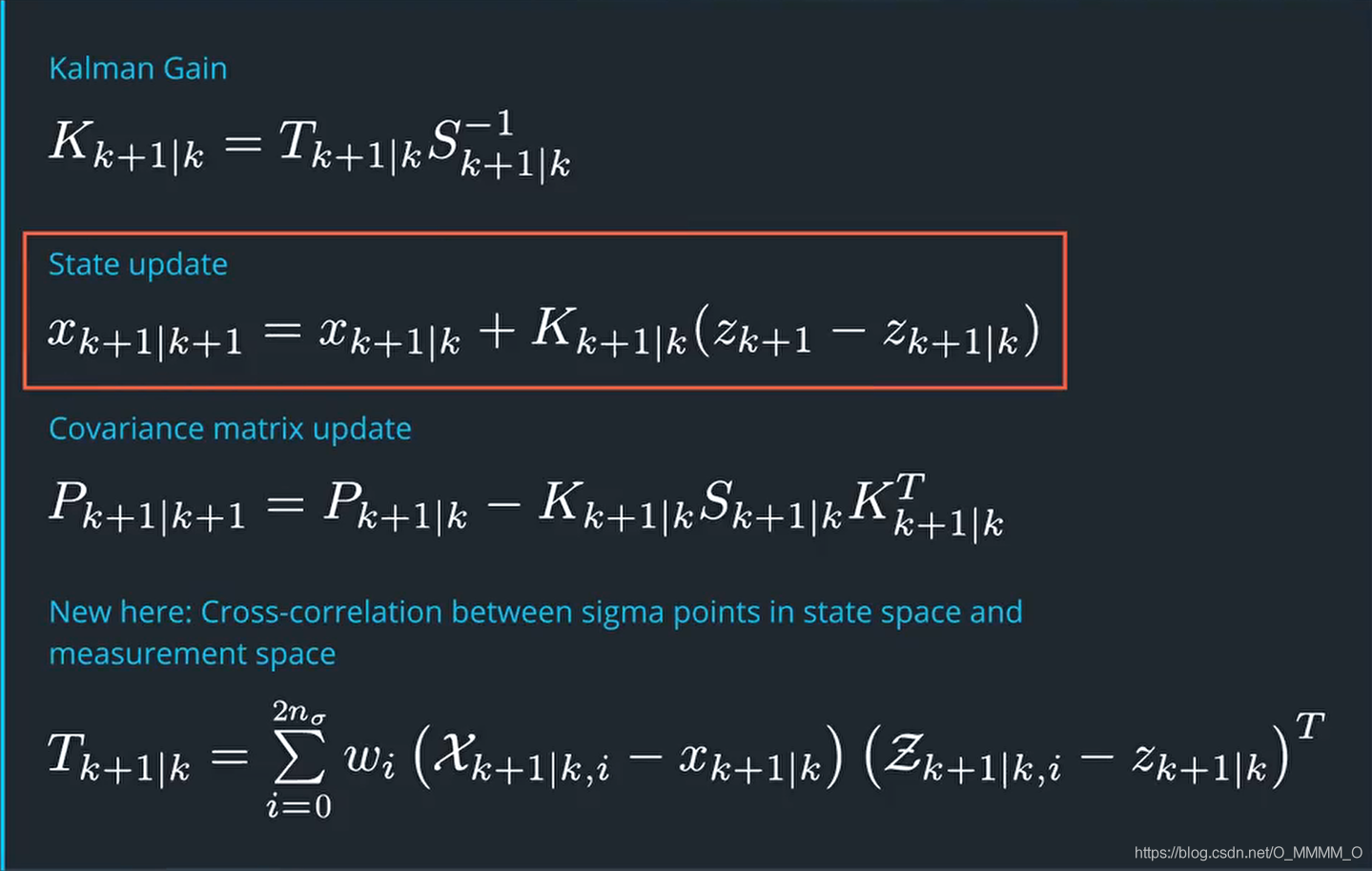
compute T
cross-correlation function,等价于 EKF 中的 \(PH^T\)1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21MatrixXd StateUpdater::compute_Tc(
const VectorXd& predicted_x, const VectorXd& predicted_z,
const MatrixXd& sigma_x, const MatrixXd& sigma_z) {
int NZ = predicted_z.size();
VectorXd dz;
VectorXd dx;
MatrixXd Tc = MatrixXd::Zero(NX, NZ);
for (int c = 0; c < NSIGMA; c++) {
dx = sigma_x.col(c) - predicted_x;
dx(3) = normalize(dx(3));
dz = sigma_z.col(c) - predicted_z;
if (NZ == NZ_RADAR) dz(1) = normalize(dz(1));
Tc += WEIGHTS[c] * dx * dz.transpose();
}
return Tc;
}update,等价于 EKF更新
1
2
3
4
5
6
7
8
9
10MatrixXd K = Tc * S.inverse();
VectorXd dz = z - predicted_z;
if (dz.size() == NZ_RADAR) {
// yaw/phi in radians
dz(1) = normalize(dz(1));
}
this->x = predicted_x + K * dz;
this->P = predicted_P - K * S * K.transpose();