Ubuntu 16.04 下 RGBDSLAM-v2 的安装和使用
Last updated on November 26, 2023 pm
简介
RGBD-SLAM-v2 is a state-of-the-art SLAM system for RGB-D cameras, e.g., the Microsoft Kinect. You can use it to create highly accurate 3D point clouds or OctoMaps.
RGBDSLAMv2 is based on the ROS project, OpenCV, PCL, OctoMap, SiftGPU and more.
rgbdslam_v2_cg
!!! Important
本人已建立了 RGBDSLAM-v2 的改版 cggos/rgbdslam_v2_cg,可直接跳转到该项目下,阅读 README.md 进行项目的安装,本文以下部分不必阅读。
!!! Important
运行环境
- 平台
- Ubuntu 16.04 + ROS kinetic
- 数据源
- RGB-D dataset: rgbd_dataset_freiburg1_xyz.bag
- RGB-D camera: Realsense Camera ZR300
安装依赖
sudo apt-get install libglew1.5-dev libdevil-dev libsuitesparse-dev- rgbdslam作者的g2o
1
git clone https://github.com/felixendres/g2o.git - pcl-1.8.0 pcl-1.8.0 的 CMakeLists.txt 中加入 C++11 支持:
1
wget https://github.com/PointCloudLibrary/pcl/archive/pcl-1.8.0.tar.gz依赖库g2o和pcl不兼容,可能导致 “required process[rgbdslam-2] has died”......Iinitiating down 问题,程序挂掉。1
SET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
编译 rgbdslam_v2
- 下载 rgbdslam_v2
1
wget -q http://github.com/felixendres/rgbdslam_v2/archive/kinetic.zip - rosdep
1
2rosdep update
rosdep install rgbdslam - 修改 CMakeLists.txt
- 第6行加入:
add_compile_options(-std=c++11) set(USE_SIFT_GPU 1 CACHE BOOL "build with support for siftgpu")改为set(USE_SIFT_GPU 0 CACHE BOOL "build with support for siftgpu")find_package(PCL 1.7 REQUIRED COMPONENTS common io)改为find_package(PCL 1.8 REQUIRED COMPONENTS common io)
- 第6行加入:
- 编译
1
catkin_make
运行
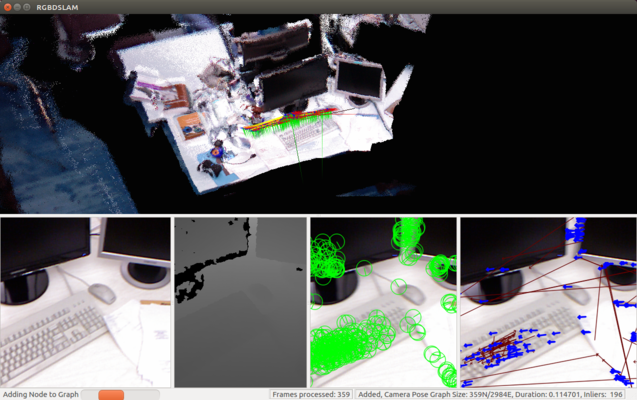
RGB-D 数据集
RGB-D 数据集 使用 rgbd_dataset_freiburg1_xyz.bag
- 修改 rgbdslam_v2 的 launch文件 rgbdslam.launch 中的 图像topic
1
2<param name="config/topic_image_mono" value="/camera/rgb/image_color"/>
<param name="config/topic_image_depth" value="/camera/depth/image"/> - 运行
1
2roscore & rosbag play rgbd_dataset_freiburg1_xyz.bag
roslaunch rgbdslam rgbdslam.launch - 结果
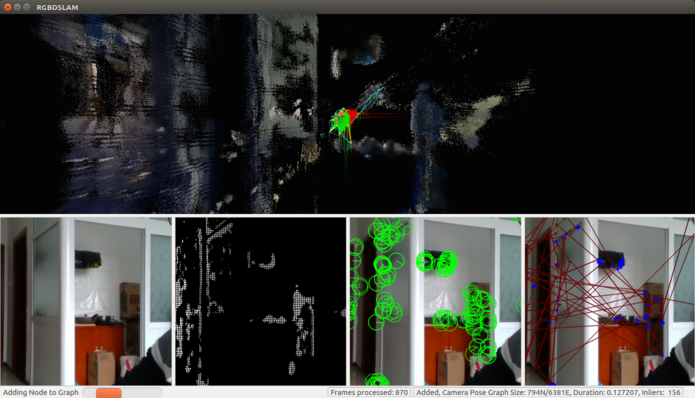
RGB-D 相机
RGB-D 相机 使用 Realsense Camera ZR300
- 修改 rgbdslam_v2 的 launch文件 rgbdslam.launch 中的 图像topic
1
2<param name="config/topic_image_mono" value="/camera/rgb/image_color"/>
<param name="config/topic_image_depth" value="/camera/depth_registered/sw_registered/image_rect_raw"/> - 运行
1
2roslaunch realsense_camera zr300_nodelet_rgbd.launch
roslaunch rgbdslam rgbdslam.launch - 结果
参考
Ubuntu 16.04 下 RGBDSLAM-v2 的安装和使用
https://cgabc.xyz/posts/246dfc2c/