视觉SLAM位姿估计(总结)
Last updated on November 26, 2023 pm
[TOC]
相关代码:
- pose_estimation in cggos/slam_park_cg
Features Based Method
2D-2D: Epipolar Geometry
2D-2D相机位姿估计 通常利用 对极几何 进行计算,是单目SLAM初始化时的关键技术。
2D-2D 对极几何 主要涉及到基础矩阵、本质矩阵和单应性矩阵的求解,并从中恢复出旋转矩阵 \(R\) 和平移向量 \(t\)。
同时,还要根据匹配的特征点和计算出的相对位姿进行三角化,恢复出 3D空间点。
在单目视觉SLAM中,以上过程主要用于SLAM的初始化:计算第二关键帧的相对位姿(假设第一帧位姿为 \([I \quad 0]\)),并计算初始Map。
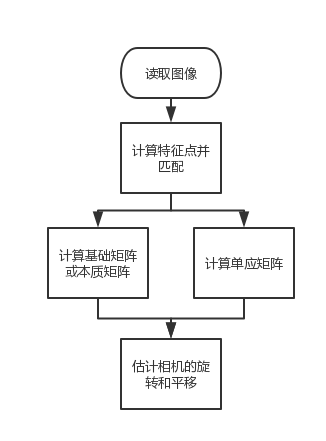
计算 基础矩阵或本质矩阵 适用于特征点不共面的情况,计算 单应矩阵 适用于特征点共面的情况
当 特征点共面 或者 相机发生纯旋转 时,基础矩阵 \(F\) 的自由度下降,就会出现所谓的 退化(degenerate)。为了能够避免退化现象的影响,通常会 同时估计基础矩阵 \(F\) 和 单应矩阵 \(H\),选择重投影误差比较小的那个作为最终的运动估计矩阵。
平移向量t 的 尺度不确定性
初始化的纯旋转问题:单目初始化不能只有旋转,必须要有一定程度的平移,否则由于t趋近于0,导致无从求解R或者误差非常大
多于8对点:RANSAC
OpenCV 中相关函数:
- findFundamentalMat
- findEssentialMat
- findHomography
- recoverPose
- decomposeEssentialMat
- triangulatePoints
相关参考代码:
1 | |
Ref: 2D-2D相机位姿估计
3D-2D: PnP
Perspective-n-Point is the problem of estimating the pose of a calibrated camera given a set of n 3D points in the world and their corresponding 2D projections in the image. [Wikipedia]
PnP(Perspective-n-Point) 是求解3D到2D点对运动的方法,求解PnP问题目前主要有直接线性变换(DLT)、P3P、EPnP、UPnP以及非线性优化方法。
在双目或RGB-D的视觉里程计中,可以直接使用PnP估计相机运动;而在单目视觉里程计中,必须先进行初始化,然后才能使用PnP。
在SLAM中,通常先使用 P3P或EPnP 等方法估计相机位姿,再构建最小二乘优化问题对估计值进行调整(BA)。
DLT
直接构建一个12个未知数的[R|t]增广矩阵(先不考虑旋转矩阵的自由度只有3),取六个点对,去求解12个未知数(每一个3D点到归一化平面的映射给出两个约束),最后将[R|t]左侧3x3矩阵块进行QR分解,用一个旋转矩阵去近似(将3x3矩阵空间投影到SE(3)流形上)。
P3P
通过3对3D/2D匹配点,得到A、B、C在相机坐标系下的3D坐标;然后,扥局3D-3D的点对,计算相机运动的R和t。
EPnP
需要4对不共面的(对于共面的情况只需要3对)3D-2D匹配点,是目前最有效的PnP求解方法。
Motion Only BA(非线性优化)
把 PnP问题 构建成一个定义于李代数上的非线性最小二乘问题,求解最好的相机位姿。
定义 残差(观测值-预测值)或 重投影误差
\[ r(\xi) = u - K \exp({\xi}^{\wedge}) P \]
构建最小二乘问题 \[ {\xi}^* = \arg \min_\xi \frac{1}{2} \sum_{i=1}^{n} {\| r(\xi) \| }_2^2 \]
细节可参考 应用: 基于李代数的视觉SLAM位姿优化
OpenCV 中相关函数:
- solvePnP
- Rodrigues
相关参考代码:
1 | |
3D-3D: ICP
对于3D-3D的位姿估计问题可以用 ICP(Iterative Closest Point) 求解,其求解方式分为两种:
- 线性代数方式(主要是 SVD)
- 非线性优化方式(类似于BA)
线性代数方式
根据ICP问题,建立第 \(i\) 对点的误差项
\[ e_i = P_i - (R \cdot {P'}_i + t) \]
构建最小二乘问题,求使误差平方和达到极小的 \(R, t\)
\[ \min_{R,t} J = \frac{1}{2} \sum_{i=1}^{n} {\| e_i \|}_2^2 \]
对目标函数处理,最终为
\[ \min_{R,t} J = \frac{1}{2} \sum_{i=1}^{n} ( {\| P_i - P_c - R({P'}_i-{P'}_c) \|}^2 + {\| P_c - R{P'}_c - t \|}^2 ) \]
根据上式,可以先求解 \(R\),再求解 \(t\)
- 计算两组点的质心 \(P_c\) 和 \({P'}_c\)
- 计算每个点的去质心坐标 \(Q_i = P_i -P_c\) 和 \({Q'}_i = {P'}_i - {P'}_c\)
- 定义矩阵 \(W = \sum_{i=1}^{n} Q_i {Q'}_i^T\),再SVD分解 \(W = U {\Sigma} V^T\)
- 当 \(W\) 满秩时, \(R = UV^T \quad\)
- 计算 \(t = P_c - R \cdot {P'}_c\)
相关参考代码:
1 | |
Optical Flow
光流是一种描述像素随时间在图像之间运动的方法,计算部分像素的称为 稀疏光流,计算所有像素的称为 稠密光流。稀疏光流以 Lucas-Kanade光流 为代表,并可以在SLAM中用于跟踪特征点位置。

LK光流
灰度不变假设
\[ I(x+dx, y+dy, t+dt) = I(x, y, t) \]
对左边一阶泰勒展开
\[ I(x+dx, y+dy, t+dt) = I(x, y, t) + \frac{\partial I}{\partial x} dx + \frac{\partial I}{\partial y} dy + \frac{\partial I}{\partial t} dt \]
则
\[ \frac{\partial I}{\partial x} dx + \frac{\partial I}{\partial y} dy + \frac{\partial I}{\partial t} dt = 0 \]
整理得
\[ \frac{\partial I}{\partial x} \frac{dx}{dt} + \frac{\partial I}{\partial y} \frac{dy}{dt} = - \frac{\partial I}{dt} \]
简写为
\[ I_x u + I_y v = -I_t \]
即
\[ \begin{bmatrix} I_x & I_y \end{bmatrix} \begin{bmatrix} u \\ v \end{bmatrix} = -I_t \]
在LK光流中,假设某个窗口(w x w)内的像素具有相同的运动
\[ {\begin{bmatrix} I_x & I_y \end{bmatrix}}_k \begin{bmatrix} u \\ v \end{bmatrix} = -{I_t}_k, \quad k=1, \dots, w^2 \]
简写为
\[ J \begin{bmatrix} u \\ v \end{bmatrix} = -e \]
计算
\[ J^T J \begin{bmatrix} u \\ v \end{bmatrix} = - J^T e \]
从而得到图像间的运动速度或者某块像素的位置。
分类
| 增量方式 | Forward | Inverse |
|---|---|---|
| Additive | FAIA | IAFA |
| Compositional | FCIA | ICIA |
Forward-Additive 光流:
\[ \min_{\Delta x_i, \Delta y_i} \sum_{W} {\| I_1(x_i,y_i) - I_2(x_i+\Delta x_i, y_i+\Delta y_i) \|}_2^2 \]
在迭代开始时,Gauss-Newton 的计算依赖于 \(I_2\) 在 \((x_i, y_i)\) 处的梯度信息。然而,角点提取算法仅保证了 \(I_1(x_i,y_i)\) 处是角点(可以认为角度点存在明显梯度),但对于 \(I_2\),我们并没有办法假设 \(I_2\) 在 \((x_i,y_i)\) 处亦有梯度,从而 Gauss-Newton 并不一定成立。
反向的光流法(inverse) 则做了一个巧妙的技巧,即用 \(I_1(x_i,y_i)\) 处的梯度,替换掉原本要计算的 \(I_2(x_i+\Delta x_i, y_i+\Delta y_i)\) 的梯度。\(I_1(x_i,y_i)\) 处的梯度不随迭代改变,所以只需计算一次,就可以在后续的迭代中一直使用,节省了大量计算时间。
讨论
- 在光流中,关键点的坐标值通常是浮点数,但图像数据都是以整数作为下标的。在光流中,通常的优化值都在几个像素内变化,所以用浮点数的像素插值(双线性插值)。
- 光流法通常只能估计几个像素内的误差。如果初始估计不够好,或者图像运动太大,光流法就无法得到有效的估计(不像特征点匹配那样)。但是,使用图像金字塔,可以让光流对图像运动不那么敏感。
- 多层金字塔光流
OpenCV 中相关函数:
- calcOpticalFlowPyrLK
相关参考代码:
1 | |
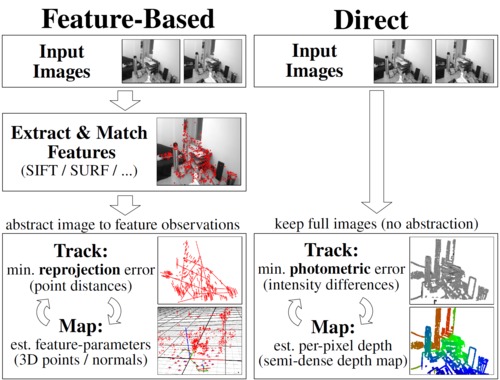
Direct Method
根据使用像素的数量,直接法分为以下三种
- 稀疏直接法:使用稀疏关键点,不计算描述子
- 半稠密直接法:只使用带有梯度的像素点,舍弃像素梯度不明显的地方
- 稠密直接法:使用所有像素
利用直接法计算相机位姿,建立优化问题时,最小化的是 光度误差(Photometric Error)
\[ r(\xi) = I_1(p) - I_2(p') = I_1(p) - I_2( K \exp({\xi}^{\wedge}) P ) \]
构建最小二乘问题 \[ {\xi}^* = \arg \min_\xi \frac{1}{2} \sum_{i=1}^{n} {\| r(\xi) \| }_2^2 \]
更具体地,稀疏直接法
\[ {\xi}^* = \arg \min_\xi \frac{1}{N} \sum_{i=1}^N \sum_{W_i} {\| I_1(p_i) - I_2 (\pi(\exp({\xi}^{\wedge}) \pi_{-1}(p_i))) \|}_2^2 \]
其雅克比矩阵的计算,可参见 视觉SLAM位姿优化时误差函数雅克比矩阵的计算
相关参考代码:
1 | |
参考文献
- 《视觉SLAM十四讲》
- Lucas-Kanade 20 Years On: A Unifying Framework
- 相机位姿求解问题?(知乎)